正在加载图片...
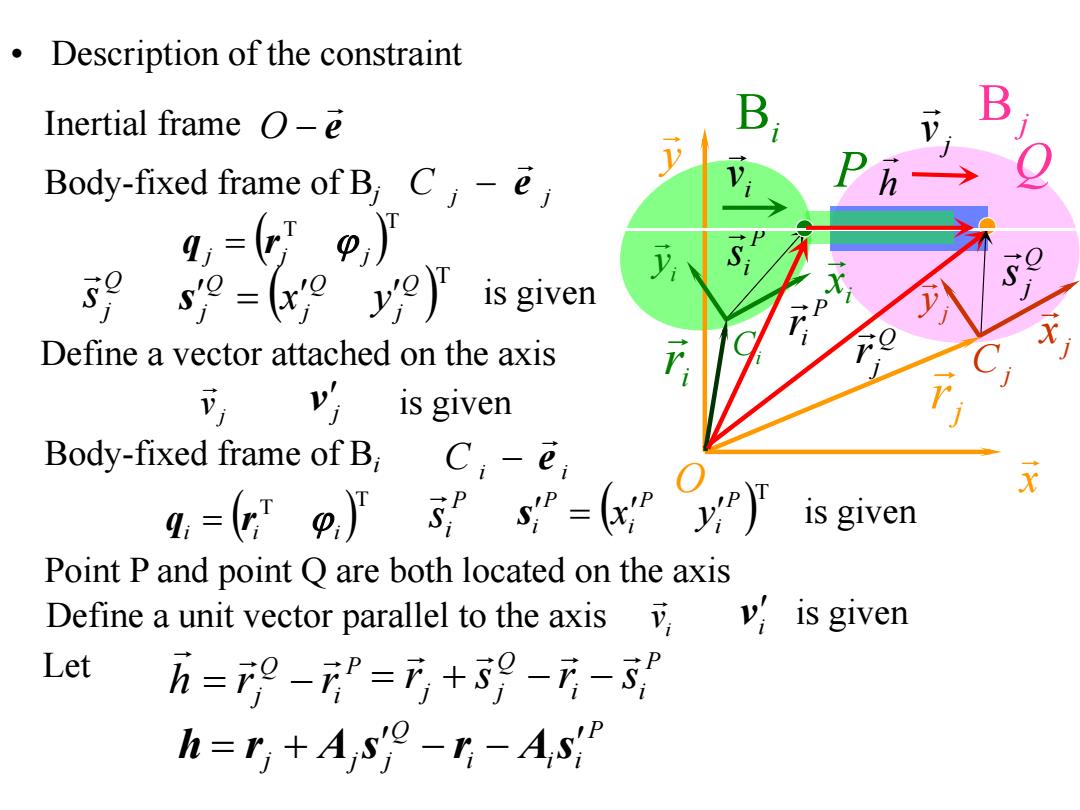
Description of the constraint Inertial frame o-e Body-fixed frame of B,C y Define a vector attached on the axis is given Body-fixed frame of B; C,-e, a.)is given Point P and point Q are both located on the axis Define a unit vector parallel to the axis可, v is given Let h=2-”=可+9-月-,” h=r+A se-r-As• Description of the constraint Bj y x O j x y j Cj j r Q Q j r Q j s e Inertial frame O C j j e Body-fixed frame of Bj T T j j j q r Q j s Q T j Q j Q j s x y Point P and point Q are both located on the axis P i s Let T T i i i q r P i s T P i P i P i s x y is given C i i e Body-fixed frame of Bi i x i y Ci Bi ir P P ir h Define a vector attached on the axis j v j v is given Define a unit vector parallel to the axis i v i v is given i v j v P i Q j h r r P i i Q j j r s r s P i i i Q j j j h r A s r A s is given