正在加载图片...
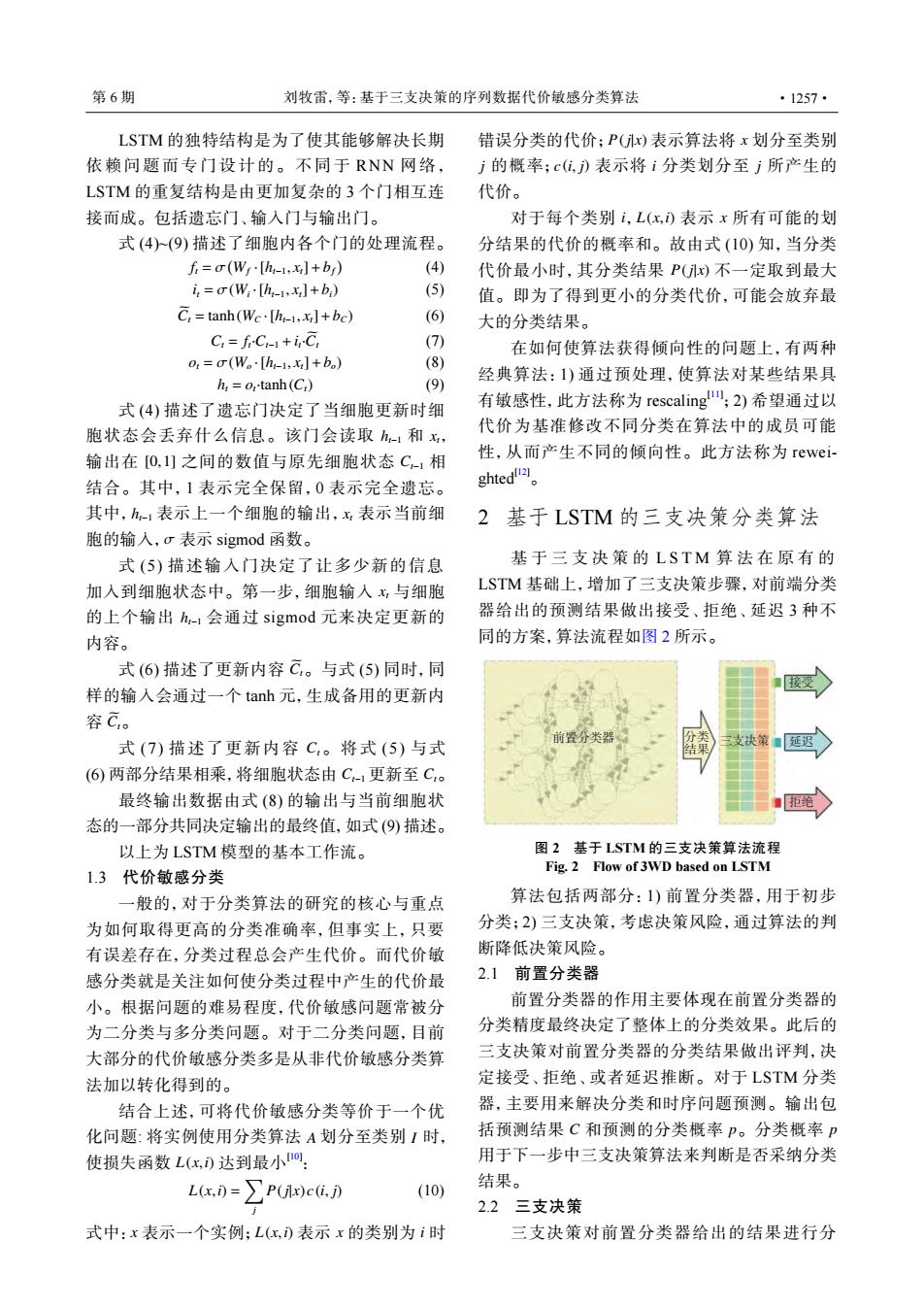
第6期 刘牧雷,等:基于三支决策的序列数据代价敏感分类算法 ·1257· LSTM的独特结构是为了使其能够解决长期 错误分类的代价;P(x)表示算法将x划分至类别 依赖问题而专门设计的。不同于RNN网络, j的概率;c(亿,》表示将i分类划分至j所产生的 LSTM的重复结构是由更加复杂的3个门相互连 代价。 接而成。包括遗忘门、输人门与输出门。 对于每个类别i,L(x,)表示x所有可能的划 式(4)(9)描述了细胞内各个门的处理流程。 分结果的代价的概率和。故由式(10)知,当分类 f=(W[h-1,x:]+b) (4) 代价最小时,其分类结果P(x)不一定取到最大 i=r(W[h-1,+b) (5) 值。即为了得到更小的分类代价,可能会放弃最 C,tanh(Wc.[h-1.x]+bc) (6) 大的分类结果。 C:=f-C-+iC (7) 在如何使算法获得倾向性的问题上,有两种 o=c(W。·[h-1,x]+bo) (8) 经典算法:1)通过预处理,使算法对某些结果具 h =o-tanh (C) (9) 式(4)描述了遗忘门决定了当细胞更新时细 有敏感性,此方法称为rescaling;2)希望通过以 胞状态会丢弃什么信息。该门会读取h-1和x, 代价为基准修改不同分类在算法中的成员可能 输出在[0,)之间的数值与原先细胞状态C-1相 性,从而产生不同的倾向性。此方法称为rewei-- 结合。其中,1表示完全保留,0表示完全遗忘。 ghted。 其中,h-1表示上一个细胞的输出,x表示当前细 2基于LSTM的三支决策分类算法 胞的输入,c表示sigmod函数。 式(5)描述输入门决定了让多少新的信息 基于三支决策的LSTM算法在原有的 加入到细胞状态中。第一步,细胞输入x与细胞 LSTM基础上,增加了三支决策步骤,对前端分类 的上个输出h,-1会通过sigmod元来决定更新的 器给出的预测结果做出接受、拒绝、延迟3种不 内容。 同的方案,算法流程如图2所示。 式(6)描述了更新内容C。与式(⑤)同时,同 样的输入会通过一个tanh元,生成备用的更新内 容C。 前瓷分类器 式(7)描述了更新内容C,。将式(5)与式 延迟 (6两部分结果相乘,将细胞状态由C-1更新至C。 最终输出数据由式(8)的输出与当前细胞状 拒绝 态的一部分共同决定输出的最终值,如式(9)描述。 以上为LSTM模型的基本工作流。 图2基于LSTM的三支决策算法流程 Fig.2 Flow of 3WD based on LSTM 1.3代价敏感分类 一般的,对于分类算法的研究的核心与重点 算法包括两部分:1)前置分类器,用于初步 为如何取得更高的分类准确率,但事实上,只要 分类:2)三支决策,考虑决策风险,通过算法的判 有误差存在,分类过程总会产生代价。而代价敏 断降低决策风险。 感分类就是关注如何使分类过程中产生的代价最 2.1前置分类器 小。根据问题的难易程度,代价敏感问题常被分 前置分类器的作用主要体现在前置分类器的 为二分类与多分类问题。对于二分类问题,目前 分类精度最终决定了整体上的分类效果。此后的 大部分的代价敏感分类多是从非代价敏感分类算 三支决策对前置分类器的分类结果做出评判,决 法加以转化得到的。 定接受、拒绝、或者延迟推断。对于LSTM分类 结合上述,可将代价敏感分类等价于一个优 器,主要用来解决分类和时序问题预测。输出包 化问题:将实例使用分类算法A划分至类别1时, 括预测结果C和预测的分类概率p。分类概率p 使损失函数L(x,)达到最小o: 用于下一步中三支决策算法来判断是否采纳分类 Lx.=∑PUc6, (10) 结果。 2.2三支决策 式中:x表示一个实例;L(,)表示x的类别为i时 三支决策对前置分类器给出的结果进行分LSTM 的独特结构是为了使其能够解决长期 依赖问题而专门设计的。不同 于 RNN 网络, LSTM 的重复结构是由更加复杂的 3 个门相互连 接而成。包括遗忘门、输入门与输出门。 式 (4)~(9) 描述了细胞内各个门的处理流程。 ft = σ ( Wf ·[ht−1, xt]+bf ) (4) it = σ(Wi ·[ht−1, xt]+bi) (5) Cet = tanh(WC ·[ht−1 , xt]+bC) (6) Ct = ft ·Ct−1 +it ·Cet (7) ot = σ(Wo ·[ht−1, xt]+bo) (8) ht = ot ·tanh(Ct) (9) ht−1 xt [0,1] Ct−1 ht−1 xt σ 式 (4) 描述了遗忘门决定了当细胞更新时细 胞状态会丢弃什么信息。该门会读取 和 , 输出在 之间的数值与原先细胞状态 相 结合。其中,1 表示完全保留,0 表示完全遗忘。 其中, 表示上一个细胞的输出, 表示当前细 胞的输入, 表示 sigmod 函数。 xt ht−1 式 (5) 描述输入门决定了让多少新的信息 加入到细胞状态中。第一步,细胞输入 与细胞 的上个输出 会通过 sigmod 元来决定更新的 内容。 Cet Cet 式 (6) 描述了更新内容 。与式 (5) 同时,同 样的输入会通过一个 tanh 元,生成备用的更新内 容 。 Ct Ct−1 Ct 式 (7) 描述了更新内容 。将式 (5) 与式 (6) 两部分结果相乘,将细胞状态由 更新至 。 最终输出数据由式 (8) 的输出与当前细胞状 态的一部分共同决定输出的最终值,如式 (9) 描述。 以上为 LSTM 模型的基本工作流。 1.3 代价敏感分类 一般的,对于分类算法的研究的核心与重点 为如何取得更高的分类准确率,但事实上,只要 有误差存在,分类过程总会产生代价。而代价敏 感分类就是关注如何使分类过程中产生的代价最 小。根据问题的难易程度,代价敏感问题常被分 为二分类与多分类问题。对于二分类问题,目前 大部分的代价敏感分类多是从非代价敏感分类算 法加以转化得到的。 A I L(x,i) 结合上述,可将代价敏感分类等价于一个优 化问题: 将实例使用分类算法 划分至类别 时, 使损失函数 达到最小[10] : L(x,i) = ∑ j P(j|x) c (i, j) (10) 式中:x 表示一个实例; L(x,i) 表示 x 的类别为 i 时 P(j|x) x j c (i, j) i j 错误分类的代价; 表示算法将 划分至类别 的概率; 表示将 分类划分至 所产生的 代价。 i L(x,i) x P(j|x) 对于每个类别 , 表示 所有可能的划 分结果的代价的概率和。故由式 (10) 知,当分类 代价最小时,其分类结果 不一定取到最大 值。即为了得到更小的分类代价,可能会放弃最 大的分类结果。 在如何使算法获得倾向性的问题上,有两种 经典算法:1) 通过预处理,使算法对某些结果具 有敏感性,此方法称为 rescaling[11] ;2) 希望通过以 代价为基准修改不同分类在算法中的成员可能 性,从而产生不同的倾向性。此方法称为 reweighted[12]。 2 基于 LSTM 的三支决策分类算法 基于三支决策 的 LST M 算法在原有 的 LSTM 基础上,增加了三支决策步骤,对前端分类 器给出的预测结果做出接受、拒绝、延迟 3 种不 同的方案,算法流程如图 2 所示。 分类 三支决策 结果 前置分类器 延迟 拒绝 接受 图 2 基于 LSTM 的三支决策算法流程 Fig. 2 Flow of 3WD based on LSTM 算法包括两部分:1) 前置分类器,用于初步 分类;2) 三支决策,考虑决策风险,通过算法的判 断降低决策风险。 2.1 前置分类器 C p p 前置分类器的作用主要体现在前置分类器的 分类精度最终决定了整体上的分类效果。此后的 三支决策对前置分类器的分类结果做出评判,决 定接受、拒绝、或者延迟推断。对于 LSTM 分类 器,主要用来解决分类和时序问题预测。输出包 括预测结果 和预测的分类概率 。分类概率 用于下一步中三支决策算法来判断是否采纳分类 结果。 2.2 三支决策 三支决策对前置分类器给出的结果进行分 第 6 期 刘牧雷,等:基于三支决策的序列数据代价敏感分类算法 ·1257·