点击下载:石河子大学:《数控技术》课程教学资源(PPT课件)第七章 数控机床的伺服系统
正在加载图片...
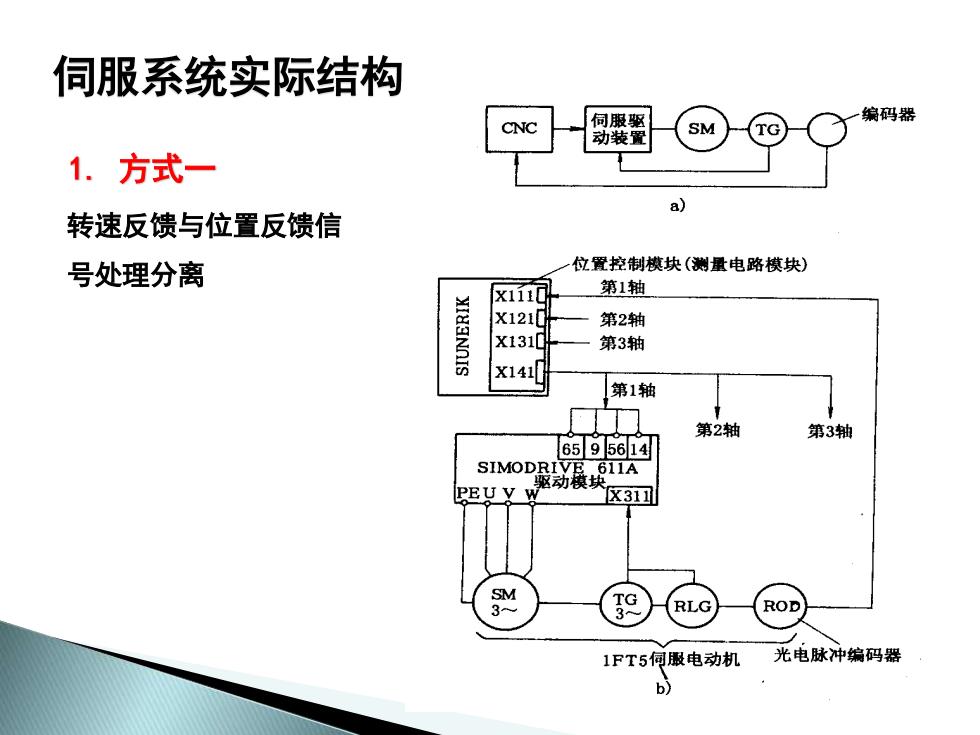
伺服系统实际结构 CNC 伺服驱 编码器 TG 动装置 SM 1.方式一 a) 转速反馈与位置反馈信 号处理分离 位置控制模块(测量电路模块) x1110 第1轴 XI8SNNIS X1210 第2轴 X1310 第3轴 x1410 第1轴 第2轴 第3轴 6595614 SIoD聚癢好 PEUV w 区311 SM 39 RLG ROD 1FT5伺最电动机 光电脉冲编码器 b)1. 方式一 转速反馈与位置反馈信 号处理分离 伺服系统实际结构
<<向上翻页
向下翻页>>
点击下载:石河子大学:《数控技术》课程教学资源(PPT课件)第七章 数控机床的伺服系统
©2008-现在 cucdc.com 高等教育资讯网 版权所有