正在加载图片...
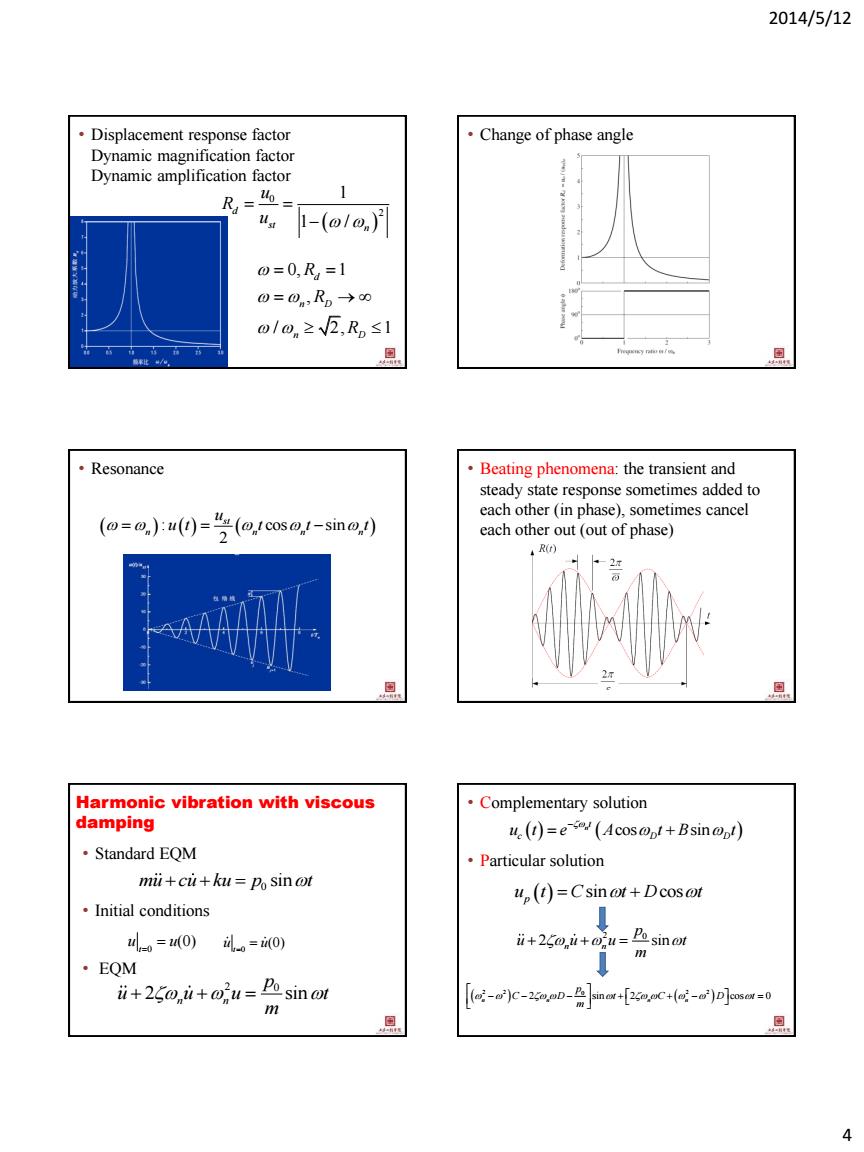
2014/5/12 Displacement response factor ·Change of phase angle Dynamic magnification factor Dynamic amplification factor 1 R= ua 1-(0l0) 0=0,R=1 0=0n,R20 o/o.≥V5,Rp≤1 ·Resonance Beating phenomena:the transient and steady state response sometimes added to (o=a)u0=2(o1cose1-sina) out(out of phase) Harmonic vibration with viscous .Complementary solution damping u(1)=e s (Acospt+Bsinopl) ·Standard EQM ·Particular solution mii+cu+ku=po sin ot u (t)=Csinot+Dcosot 。Initial conditions =0) l。=i0) i+20.i- ·EQM i+25o+ou=Po sin ot m (i-)c-2cD-sina+[+(o-)2014/5/12 4 0 2 1 1 / d st n u R u • Displacement response factor Dynamic magnification factor Dynamic amplification factor 0, 1 , / 2, 1 d n D n D R R R • Change of phase angle • Resonance : cos sin 2 st n n n n u u t t t t • Beating phenomena: the transient and steady state response sometimes added to each other (in phase), sometimes cancel each other out (out of phase) Harmonic vibration with viscous damping • Standard EQM • Initial conditions • EQM 0 mu cu ku p t sin 0 (0) t u u 0 (0) t u u 2 0 2 sin n n p u u u t m • Complementary solution • Particular solution cos sin n t c D D u t e A t B t sin cos p u t C t D t 2 2 2 2 0 2 sin 2 cos 0 n n n n p C D t C D t m 2 0 2 sin n n p u u u t m