正在加载图片...
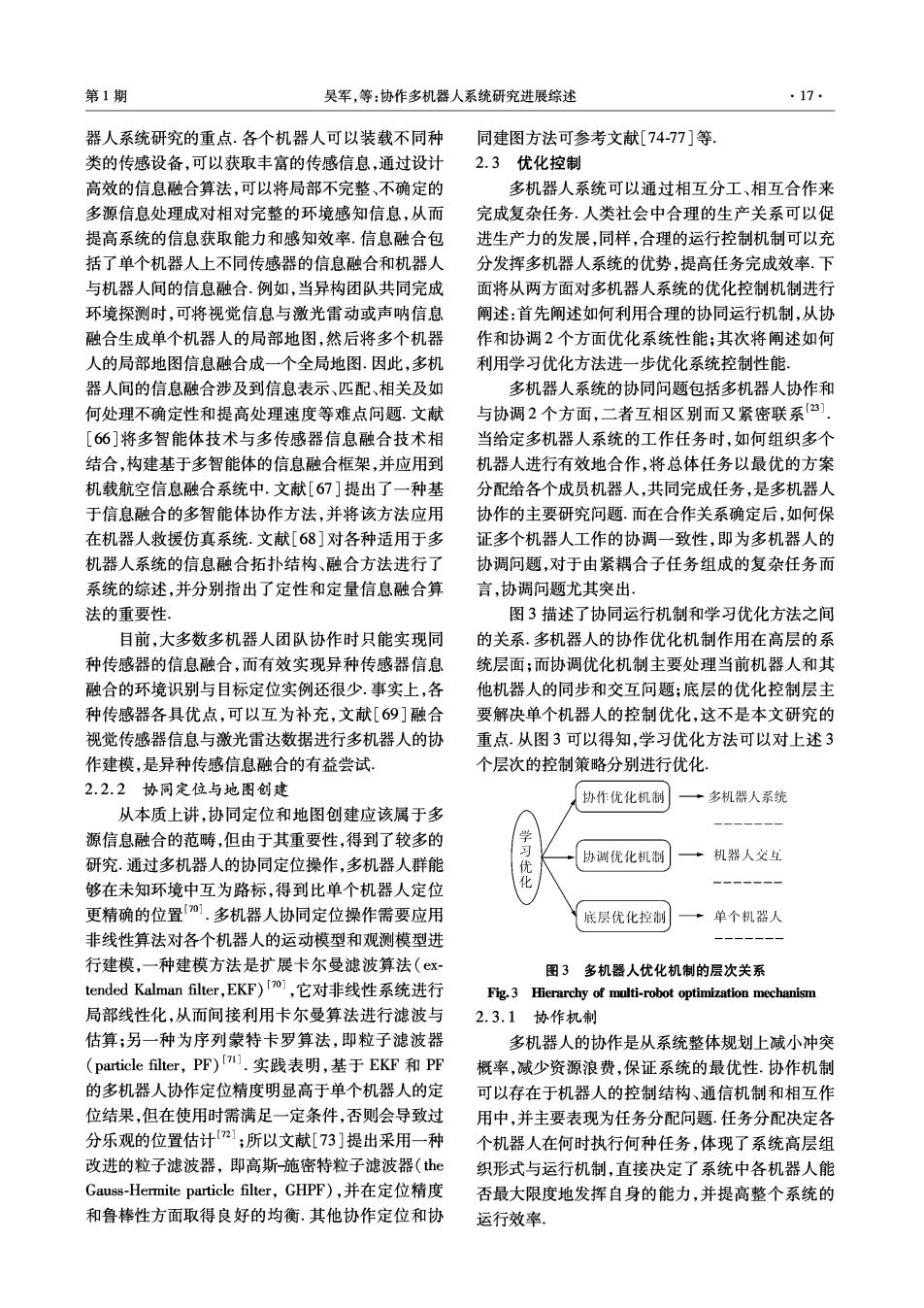
第1期 吴军,等:协作多机器人系统研究进展综述 ·17 器人系统研究的重点.各个机器人可以装载不同种 同建图方法可参考文献[74-77]等 类的传感设备,可以获取丰富的传感信息,通过设计 2.3优化控制 高效的信息融合算法,可以将局部不完整、不确定的 多机器人系统可以通过相互分工、相互合作来 多源信息处理成对相对完整的环境感知信息,从而 完成复杂任务,人类社会中合理的生产关系可以促 提高系统的信息获取能力和感知效率.信息融合包 进生产力的发展,同样,合理的运行控制机制可以充 括了单个机器人上不同传感器的信息融合和机器人 分发挥多机器人系统的优势,提高任务完成效率.下 与机器人间的信息融合.例如,当异构团队共同完成 面将从两方面对多机器人系统的优化控制机制进行 环境探测时,可将视觉信息与激光雷动或声呐信息 阐述:首先阐述如何利用合理的协同运行机制,从协 融合生成单个机器人的局部地图,然后将多个机器 作和协调2个方面优化系统性能:其次将阐述如何 人的局部地图信息融合成一个全局地图.因此,多机 利用学习优化方法进一步优化系统控制性能, 器人间的信息融合涉及到信息表示、匹配、相关及如 多机器人系统的协同问题包括多机器人协作和 何处理不确定性和提高处理速度等难点问题.文献 与协调2个方面,二者互相区别而又紧密联系3], [66]将多智能体技术与多传感器信息融合技术相 当给定多机器人系统的工作任务时,如何组织多个 结合,构建基于多智能体的信息融合框架,并应用到 机器人进行有效地合作,将总体任务以最优的方案 机载航空信息融合系统中.文献[67]提出了一种基 分配给各个成员机器人,共同完成任务,是多机器人 于信息融合的多智能体协作方法,并将该方法应用 协作的主要研究问题.而在合作关系确定后,如何保 在机器人救援仿真系统.文献[68]对各种适用于多 证多个机器人工作的协调一致性,即为多机器人的 机器人系统的信息融合拓扑结构、融合方法进行了 协调问题,对于由紧耦合子任务组成的复杂任务而 系统的综述,并分别指出了定性和定量信息融合算 言,协调问题尤其突出, 法的重要性, 图3描述了协同运行机制和学习优化方法之间 目前,大多数多机器人团队协作时只能实现同 的关系.多机器人的协作优化机制作用在高层的系 种传感器的信息融合,而有效实现异种传感器信息 统层面:而协调优化机制主要处理当前机器人和其 融合的环境识别与目标定位实例还很少.事实上,各 他机器人的同步和交互问题;底层的优化控制层主 种传感器各具优点,可以互为补充,文献[69]融合 要解决单个机器人的控制优化,这不是本文研究的 视觉传感器信息与激光雷达数据进行多机器人的协 重点.从图3可以得知,学习优化方法可以对上述3 作建模,是异种传感信息融合的有益尝试。 个层次的控制策略分别进行优化, 2.2.2协同定位与地图创建 协作优化机制 →多机器人系统 从本质上讲,协同定位和地图创建应该属于多 源信息融合的范畴,但由于其重要性,得到了较多的 研究.通过多机器人的协同定位操作,多机器人群能 协调优化机制 机器人父互 够在未知环境中互为路标,得到比单个机器人定位 更精确的位置[0].多机器人协同定位操作需要应用 底层优化控制 ·单个机器人 非线性算法对各个机器人的运动模型和观测模型进 行建模,一种建模方法是扩展卡尔曼滤波算法(ex- 图3多机器人优化机制的层次关系 tended Kalman filter,EKF)Io,它对非线性系统进行 Fig.3 Hierarchy of multi-robot optimization mechanism 局部线性化,从而间接利用卡尔曼算法进行滤波与 2.3.1协作机制 估算;另一种为序列蒙特卡罗算法,即粒子滤波器 多机器人的协作是从系统整体规划上减小冲突 (particle filter,PF)[.实践表明,基于EKF和PF 概率,减少资源浪费,保证系统的最优性.协作机制 的多机器人协作定位精度明显高于单个机器人的定 可以存在于机器人的控制结构、通信机制和相互作 位结果,但在使用时需满足一定条件,否则会导致过 用中,并主要表现为任务分配问题.任务分配决定各 分乐观的位置估计”1;所以文献[73]提出采用一种 个机器人在何时执行何种任务,体现了系统高层组 改进的粒子滤波器,即高斯施密特粒子滤波器(the 织形式与运行机制,直接决定了系统中各机器人能 Gauss-Hermite particle filter,GHPP),并在定位精度 否最大限度地发挥自身的能力,并提高整个系统的 和鲁棒性方面取得良好的均衡.其他协作定位和协 运行效率