正在加载图片...
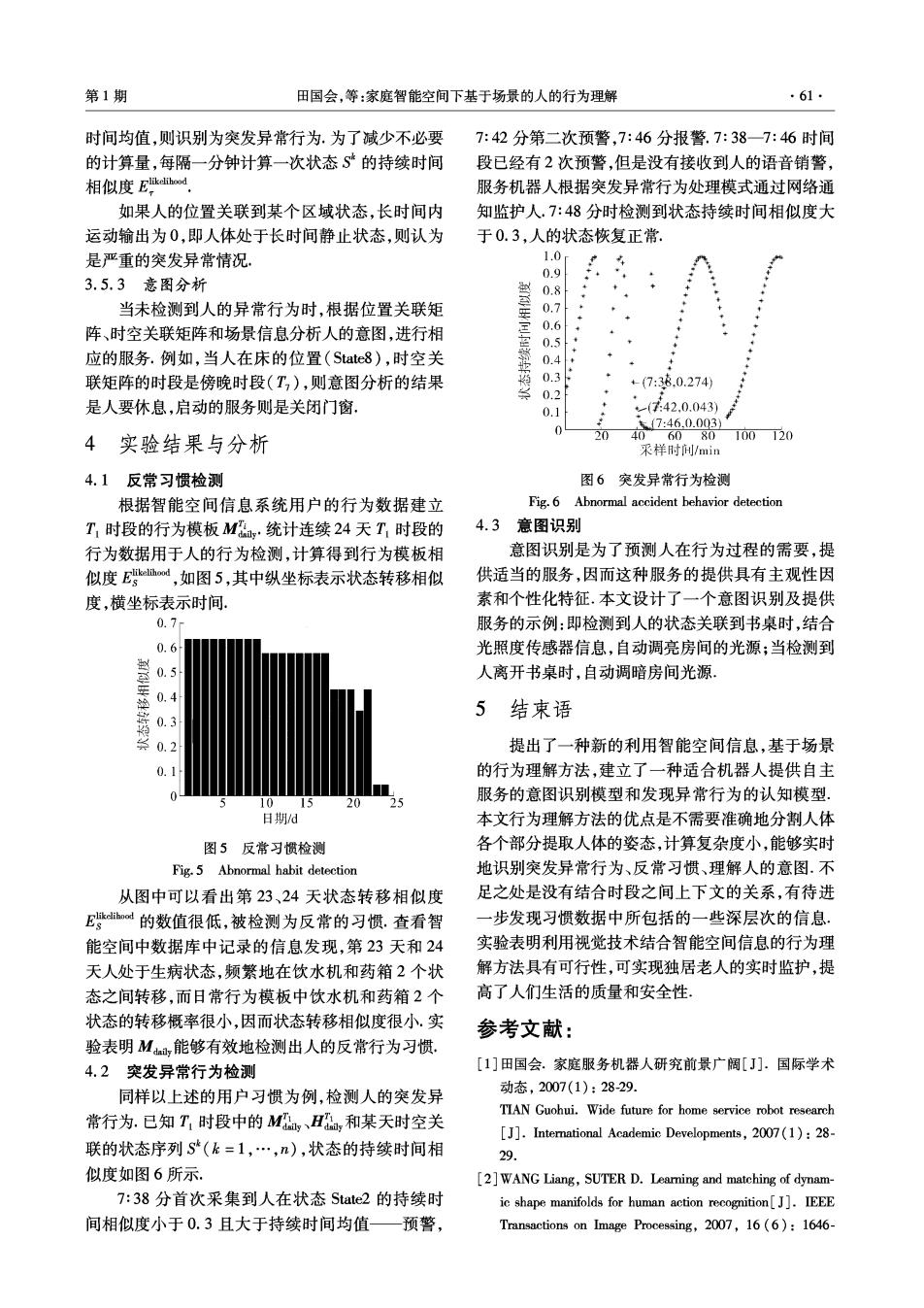
第1期 田国会,等:家庭智能空间下基于场景的人的行为理解 61 时间均值,则识别为突发异常行为,为了减少不必要 7:42分第二次预警,7:46分报警.7:38-7:46时间 的计算量,每隔一分钟计算一次状态S的持续时间 段已经有2次预警,但是没有接收到人的语音销警, 相似度E.aaod」 服务机器人根据突发异常行为处理模式通过网络通 如果人的位置关联到某个区域状态,长时间内 知监护人.7:48分时检测到状态持续时间相似度大 运动输出为0,即人体处于长时间静止状态,则认为 于0.3,人的状态恢复正常 是严重的突发异常情况, 1.0 0.9 3.5.3意图分析 0.8 当未检测到人的异常行为时,根据位置关联矩 0.7 阵、时空关联矩阵和场景信息分析人的意图,进行相 0.6 0.5 应的服务.例如,当人在床的位置(State8),时空关 0.4+ 联矩阵的时段是傍晚时段(T,),则意图分析的结果 颦 0.3 +7:38.0.274) 0.2 是人要休息,启动的服务则是关闭门窗 0.1 (42.0.043) 4实验结果与分析 20 4460003 6080 100120 采样时间/min 4.1反常习惯检测 图6突发异常行为检测 根据智能空间信息系统用户的行为数据建立 Fig.6 Abnormal accident behavior detection T,时段的行为模板Mg·统计连续24天T时段的 4.3意图识别 行为数据用于人的行为检测,计算得到行为模板相 意图识别是为了预测人在行为过程的需要,提 似度E,如图5,其中纵坐标表示状态转移相似 供适当的服务,因而这种服务的提供具有主观性因 度,横坐标表示时间, 素和个性化特征.本文设计了一个意图识别及提供 0.7r 服务的示例:即检测到人的状态关联到书桌时,结合 0.6 光照度传感器信息,自动调亮房间的光源:当检测到 0.5 人离开书桌时,自动调暗房间光源, 5结束语 0 3 、3 提出了一种新的利用智能空间信息,基于场景 的行为理解方法,建立了一种适合机器人提供自主 服务的意图识别模型和发现异常行为的认知模型. 0 20 日期/d 本文行为理解方法的优点是不需要准确地分割人体 图5反常习惯检测 各个部分提取人体的姿态,计算复杂度小,能够实时 Fig.5 Abnormal habit detection 地识别突发异常行为、反常习惯、理解人的意图.不 从图中可以看出第23、24天状态转移相似度 足之处是没有结合时段之间上下文的关系,有待进 Edi的数值很低,被检测为反常的习惯.查看智 一步发现习惯数据中所包括的一些深层次的信息, 能空间中数据库中记录的信息发现,第23天和24 实验表明利用视觉技术结合智能空间信息的行为理 天人处于生病状态,频繁地在饮水机和药箱2个状 解方法具有可行性,可实现独居老人的实时监护,提 态之间转移,而日常行为模板中饮水机和药箱2个 高了人们生活的质量和安全性。 状态的转移概率很小,因而状态转移相似度很小.实 参考文献: 验表明M能够有效地检测出人的反常行为习惯. 4.2突发异常行为检测 [1]田国会.家庭服务机器人研究前景广阔[J].国际学术 同样以上述的用户习惯为例,检测人的突发异 动态,2007(1):2829. 常行为.已知T,时段中的M、H,和某天时空关 TIAN Guohui.Wide future for home service robot research [J].International Academic Developments,2007(1):28- 联的状态序列S(系=1,…,n),状态的持续时间相 29 似度如图6所示. [2]WANG Liang,SUTER D.Leaming and matching of dynam- 7:38分首次采集到人在状态State2的持续时 ic shape manifolds for human action recognition[J].IEEE 间相似度小于0.3且大于持续时间均值一预警, Transactions on Image Processing,2007,16(6):1646-