正在加载图片...
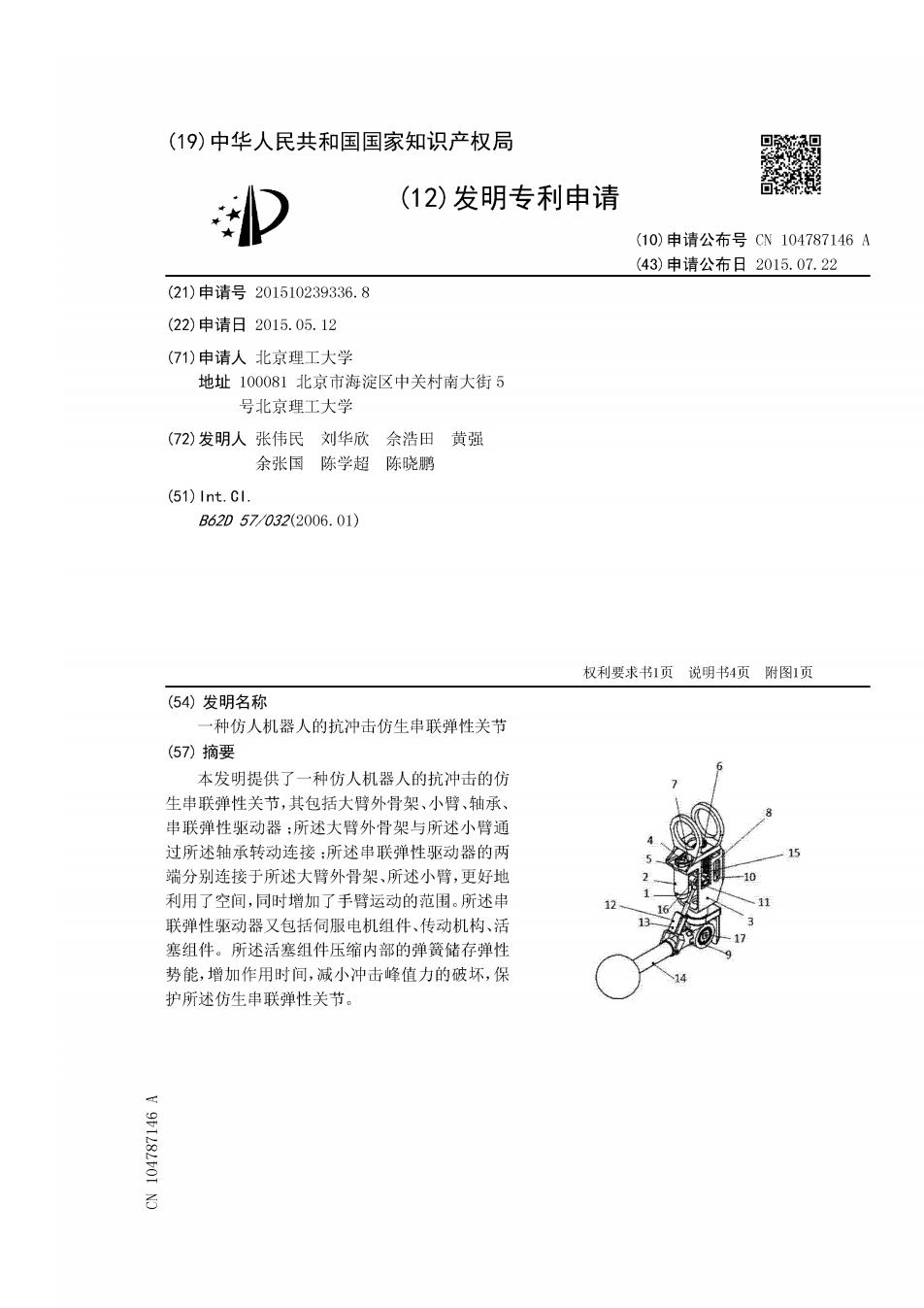
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN104787146A (43)申请公布日2015.07.22 (21)申请号201510239336.8 (22)申请日2015.05.12 (71)申请人北京理工大学 地址100081北京市海淀区中关村南大街5 号北京理工大学 (72)发明人张伟民刘华欣佘浩田黄强 余张国陈学超陈晓鹏 (51)Int.CI. B62D57032(2006.01) 权利要求书1页说明书4页附图1页 (54)发明名称 种仿人机器人的抗冲击仿生串联弹性关节 (57)摘要 本发明提供了一种仿人机器人的抗冲击的仿 生串联弹性关节,其包括大臂外骨架、小臂、轴承、 串联弹性驱动器:所述大臂外骨架与所述小臂通 过所述轴承转动连接:所述串联弹性驱动器的两 端分别连接于所述大臂外骨架、所述小臂,更好地 利用了空间,同时增加了手臂运动的范围。所述串 联弹性驱动器又包括伺服电机组件、传动机构、活 塞组件。所述活塞组件压缩内部的弹簧储存弹性 势能,增加作用时间,减小冲击峰值力的破坏,保 护所述仿生串联弹性关节。 V 9V1L8LVOI NO