正在加载图片...
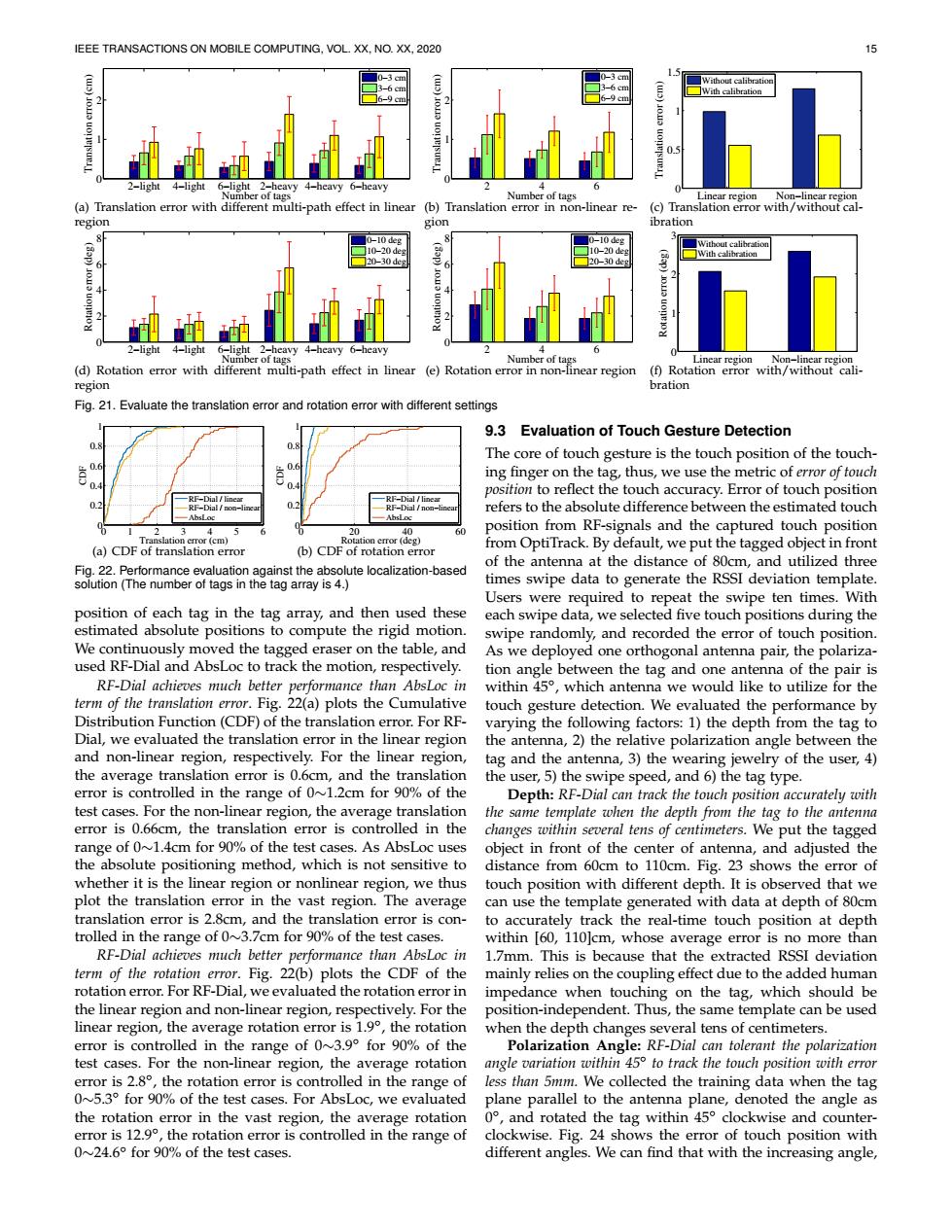
IEEE TRANSACTIONS ON MOBILE COMPUTING,VOL.XX,NO.XX,2020 0-3 手 6-9c 4-ight 6-ht 2-heavy 4-heavy 6-heavy Number of tags Number of tags Linear region Non-linear region (a)Translation error with different multi-path effect in linear (b)Translation error in non-linear re- (c)Translation error with/without cal- region gion ibration 10 deg -10 deg 20-30deg 20-30de 邮啦 2-light 4-light 6-light 2-heavy 4-heavy 6-heavy Number of tags Number of tags Linear region Non-linear region (d)Rotation error with different multi-path effect in linear (e)Rotation error in non-linear region (f)Rotation error with/without cali- region bration Fig.21.Evaluate the translation error and rotation error with different settings 9.3 Evaluation of Touch Gesture Detection The core of touch gesture is the touch position of the touch- ing finger on the tag,thus,we use the metric of error of fouch position to reflect the touch accuracy.Error of touch position RF-Dial line -RF-Dial linea refers to the absolute difference between the estimated touch AbsLoc 0 50 position from RF-signals and the captured touch position Translation error (cm) Rotation error (deg) (a)CDF of translation error (b)CDF of rotation error from OptiTrack.By default,we put the tagged object in front of the antenna at the distance of 80cm,and utilized three Fig.22.Performance evaluation against the absolute localization-based solution (The number of tags in the tag array is 4.) times swipe data to generate the RSSI deviation template. Users were required to repeat the swipe ten times.With position of each tag in the tag array,and then used these each swipe data,we selected five touch positions during the estimated absolute positions to compute the rigid motion. swipe randomly,and recorded the error of touch position. We continuously moved the tagged eraser on the table,and As we deployed one orthogonal antenna pair,the polariza- used RF-Dial and AbsLoc to track the motion,respectively. tion angle between the tag and one antenna of the pair is RF-Dial achieves much better performance than AbsLoc in within 45,which antenna we would like to utilize for the term of the translation error.Fig.22(a)plots the Cumulative touch gesture detection.We evaluated the performance by Distribution Function(CDF)of the translation error.For RF- varying the following factors:1)the depth from the tag to Dial,we evaluated the translation error in the linear region the antenna,2)the relative polarization angle between the and non-linear region,respectively.For the linear region, tag and the antenna,3)the wearing jewelry of the user,4) the average translation error is 0.6cm,and the translation the user,5)the swipe speed,and 6)the tag type. error is controlled in the range of 0~1.2cm for 90%of the Depth:RF-Dial can track the touch position accurately with test cases.For the non-linear region,the average translation the same template when the depth from the tag to the antenna error is 0.66cm,the translation error is controlled in the changes within several tens of centimeters.We put the tagged range of 0~1.4cm for 90%of the test cases.As AbsLoc uses object in front of the center of antenna,and adjusted the the absolute positioning method,which is not sensitive to distance from 60cm to 110cm.Fig.23 shows the error of whether it is the linear region or nonlinear region,we thus touch position with different depth.It is observed that we plot the translation error in the vast region.The average can use the template generated with data at depth of 80cm translation error is 2.8cm,and the translation error is con- to accurately track the real-time touch position at depth trolled in the range of 0~3.7cm for 90%of the test cases. within [60,110]cm,whose average error is no more than RF-Dial achieves much better performance than AbsLoc in 1.7mm.This is because that the extracted RSSI deviation term of the rotation error.Fig.22(b)plots the CDF of the mainly relies on the coupling effect due to the added human rotation error.For RF-Dial,we evaluated the rotation error in impedance when touching on the tag,which should be the linear region and non-linear region,respectively.For the position-independent.Thus,the same template can be used linear region,the average rotation error is 1.9,the rotation when the depth changes several tens of centimeters. error is controlled in the range of 0~3.9 for 90%of the Polarization Angle:RF-Dial can tolerant the polarization test cases.For the non-linear region,the average rotation angle variation within 45 to track the touch position with error error is 2.8,the rotation error is controlled in the range of less than 5mm.We collected the training data when the tag 0~5.3 for 90%of the test cases.For AbsLoc,we evaluated plane parallel to the antenna plane,denoted the angle as the rotation error in the vast region,the average rotation O°,and rotated the tag within45°clockwise and counter-- error is 12.9,the rotation error is controlled in the range of clockwise.Fig.24 shows the error of touch position with 0~24.6 for 90%of the test cases. different angles.We can find that with the increasing angle,IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. XX, NO. XX, 2020 15 2−light 4−light 6−light 2−heavy 4−heavy 6−heavy 0 1 2 Translation error (cm) Number of tags 0−3 cm 3−6 cm 6−9 cm (a) Translation error with different multi-path effect in linear region 2 4 6 0 1 2 Translation error (cm) Number of tags 0−3 cm 3−6 cm 6−9 cm (b) Translation error in non-linear region Linear region Non−linear region 0 0.5 1 1.5 Translation error (cm) Without calibration With calibration (c) Translation error with/without calibration 2−light 4−light 6−light 2−heavy 4−heavy 6−heavy 0 2 4 6 8 Rotation error (deg) Number of tags 0−10 deg 10−20 deg 20−30 deg (d) Rotation error with different multi-path effect in linear region 2 4 6 0 2 4 6 8 Rotation error (deg) Number of tags 0−10 deg 10−20 deg 20−30 deg (e) Rotation error in non-linear region Linear region Non−linear region 0 1 2 3 Rotation error (deg) Without calibration With calibration (f) Rotation error with/without calibration Fig. 21. Evaluate the translation error and rotation error with different settings 0 1 2 3 4 5 6 0 0.2 0.4 0.6 0.8 1 Translation error (cm) CDF RF−Dial / linear RF−Dial / non−linear AbsLoc (a) CDF of translation error 0 20 40 60 0 0.2 0.4 0.6 0.8 1 Rotation error (deg) CDF RF−Dial / linear RF−Dial / non−linear AbsLoc (b) CDF of rotation error Fig. 22. Performance evaluation against the absolute localization-based solution (The number of tags in the tag array is 4.) position of each tag in the tag array, and then used these estimated absolute positions to compute the rigid motion. We continuously moved the tagged eraser on the table, and used RF-Dial and AbsLoc to track the motion, respectively. RF-Dial achieves much better performance than AbsLoc in term of the translation error. Fig. 22(a) plots the Cumulative Distribution Function (CDF) of the translation error. For RFDial, we evaluated the translation error in the linear region and non-linear region, respectively. For the linear region, the average translation error is 0.6cm, and the translation error is controlled in the range of 0∼1.2cm for 90% of the test cases. For the non-linear region, the average translation error is 0.66cm, the translation error is controlled in the range of 0∼1.4cm for 90% of the test cases. As AbsLoc uses the absolute positioning method, which is not sensitive to whether it is the linear region or nonlinear region, we thus plot the translation error in the vast region. The average translation error is 2.8cm, and the translation error is controlled in the range of 0∼3.7cm for 90% of the test cases. RF-Dial achieves much better performance than AbsLoc in term of the rotation error. Fig. 22(b) plots the CDF of the rotation error. For RF-Dial, we evaluated the rotation error in the linear region and non-linear region, respectively. For the linear region, the average rotation error is 1.9◦ , the rotation error is controlled in the range of 0∼3.9◦ for 90% of the test cases. For the non-linear region, the average rotation error is 2.8◦ , the rotation error is controlled in the range of 0∼5.3◦ for 90% of the test cases. For AbsLoc, we evaluated the rotation error in the vast region, the average rotation error is 12.9◦ , the rotation error is controlled in the range of 0∼24.6◦ for 90% of the test cases. 9.3 Evaluation of Touch Gesture Detection The core of touch gesture is the touch position of the touching finger on the tag, thus, we use the metric of error of touch position to reflect the touch accuracy. Error of touch position refers to the absolute difference between the estimated touch position from RF-signals and the captured touch position from OptiTrack. By default, we put the tagged object in front of the antenna at the distance of 80cm, and utilized three times swipe data to generate the RSSI deviation template. Users were required to repeat the swipe ten times. With each swipe data, we selected five touch positions during the swipe randomly, and recorded the error of touch position. As we deployed one orthogonal antenna pair, the polarization angle between the tag and one antenna of the pair is within 45◦ , which antenna we would like to utilize for the touch gesture detection. We evaluated the performance by varying the following factors: 1) the depth from the tag to the antenna, 2) the relative polarization angle between the tag and the antenna, 3) the wearing jewelry of the user, 4) the user, 5) the swipe speed, and 6) the tag type. Depth: RF-Dial can track the touch position accurately with the same template when the depth from the tag to the antenna changes within several tens of centimeters. We put the tagged object in front of the center of antenna, and adjusted the distance from 60cm to 110cm. Fig. 23 shows the error of touch position with different depth. It is observed that we can use the template generated with data at depth of 80cm to accurately track the real-time touch position at depth within [60, 110]cm, whose average error is no more than 1.7mm. This is because that the extracted RSSI deviation mainly relies on the coupling effect due to the added human impedance when touching on the tag, which should be position-independent. Thus, the same template can be used when the depth changes several tens of centimeters. Polarization Angle: RF-Dial can tolerant the polarization angle variation within 45◦ to track the touch position with error less than 5mm. We collected the training data when the tag plane parallel to the antenna plane, denoted the angle as 0 ◦ , and rotated the tag within 45◦ clockwise and counterclockwise. Fig. 24 shows the error of touch position with different angles. We can find that with the increasing angle