正在加载图片...
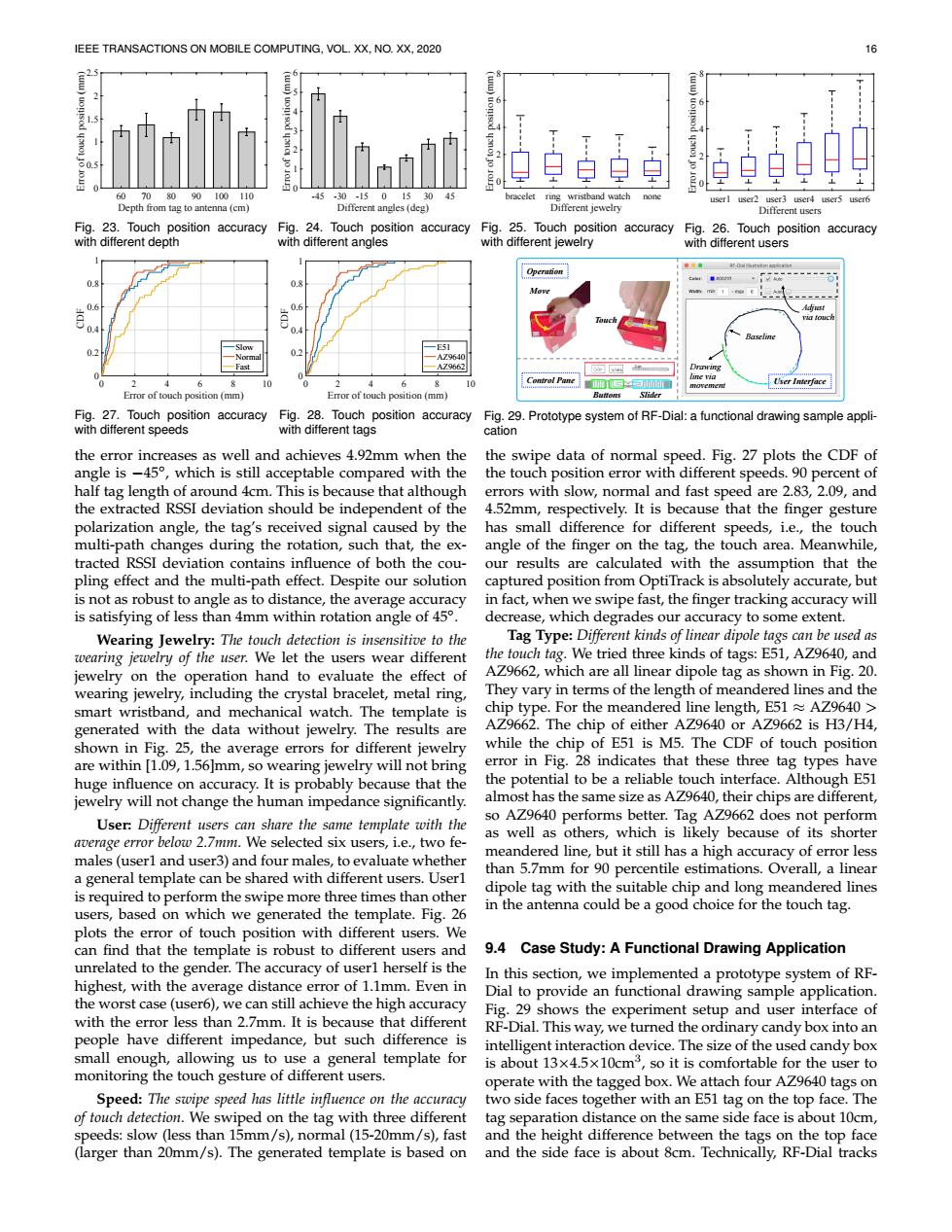
IEEE TRANSACTIONS ON MOBILE COMPUTING,VOL.XX,NO.XX,2020 16 60708090100110 45 -30-1501530 bracelet ring wristband watch user2 user3 user4 users user6 Depth from tag to antenna (cm) Different angles(deg) Different jewelry Different users Fig.23.Touch position accuracy Fig.24.Touch position accuracy Fig.25.Touch position accuracy Fig.26.Touch position accuracy with different depth with different angles with different jewelry with different users Operation 0 0.8 0.6 0.6 0.4 E51 0.1 0. Z966 Control Pane Error of touch position(mm) Error of touch position(mm) Butfons Slider Fig.27.Touch position accuracy Fig.28.Touch position accuracy Fig.29.Prototype system of RF-Dial:a functional drawing sample appli- with different speeds with different tags cation the error increases as well and achieves 4.92mm when the the swipe data of normal speed.Fig.27 plots the CDF of angle is-45,which is still acceptable compared with the the touch position error with different speeds.90 percent of half tag length of around 4cm.This is because that although errors with slow,normal and fast speed are 2.83,2.09,and the extracted RSSI deviation should be independent of the 4.52mm,respectively.It is because that the finger gesture polarization angle,the tag's received signal caused by the has small difference for different speeds,i.e.,the touch multi-path changes during the rotation,such that,the ex- angle of the finger on the tag,the touch area.Meanwhile, tracted RSSI deviation contains influence of both the cou- our results are calculated with the assumption that the pling effect and the multi-path effect.Despite our solution captured position from OptiTrack is absolutely accurate,but is not as robust to angle as to distance,the average accuracy in fact,when we swipe fast,the finger tracking accuracy will is satisfying of less than 4mm within rotation angle of 45. decrease,which degrades our accuracy to some extent. Wearing Jewelry:The touch detection is insensitive to the Tag Type:Different kinds of linear dipole tags can be used as wearing jewelry of the user.We let the users wear different the touch tag.We tried three kinds of tags:E51,AZ9640,and jewelry on the operation hand to evaluate the effect of AZ9662,which are all linear dipole tag as shown in Fig.20. wearing jewelry,including the crystal bracelet,metal ring, They vary in terms of the length of meandered lines and the smart wristband,and mechanical watch.The template is chip type.For the meandered line length,E51AZ9640> generated with the data without jewelry.The results are AZ9662.The chip of either AZ9640 or AZ9662 is H3/H4 shown in Fig.25,the average errors for different jewelry while the chip of E51 is M5.The CDF of touch position are within [1.09,1.56]mm,so wearing jewelry will not bring error in Fig.28 indicates that these three tag types have huge influence on accuracy.It is probably because that the the potential to be a reliable touch interface.Although E51 jewelry will not change the human impedance significantly. almost has the same size as AZ9640,their chips are different, User.Different users can share the same template with the so AZ9640 performs better.Tag AZ9662 does not perform average error below 2.7mm.We selected six users,i.e.,two fe- as well as others,which is likely because of its shorter males(userl and user3)and four males,to evaluate whether meandered line,but it still has a high accuracy of error less a general template can be shared with different users.Userl than 5.7mm for 90 percentile estimations.Overall,a linear dipole tag with the suitable chip and long meandered lines is required to perform the swipe more three times than other users,based on which we generated the template.Fig.26 in the antenna could be a good choice for the touch tag. plots the error of touch position with different users.We can find that the template is robust to different users and 9.4 Case Study:A Functional Drawing Application unrelated to the gender.The accuracy of user1 herself is the In this section,we implemented a prototype system of RF- highest,with the average distance error of 1.1mm.Even in Dial to provide an functional drawing sample application. the worst case(user6),we can still achieve the high accuracy Fig.29 shows the experiment setup and user interface of with the error less than 2.7mm.It is because that different RF-Dial.This way,we turned the ordinary candy box into an people have different impedance,but such difference is intelligent interaction device.The size of the used candy box small enough,allowing us to use a general template for is about 13x4.5x10cm,so it is comfortable for the user to monitoring the touch gesture of different users. operate with the tagged box.We attach four AZ9640 tags on Speed:The swipe speed has little influence on the accuracy two side faces together with an E51 tag on the top face.The of touch detection.We swiped on the tag with three different tag separation distance on the same side face is about 10cm, speeds:slow (less than 15mm/s),normal(15-20mm/s),fast and the height difference between the tags on the top face (larger than 20mm/s).The generated template is based on and the side face is about 8cm.Technically,RF-Dial tracksIEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. XX, NO. XX, 2020 16 60 70 80 90 100 110 Depth from tag to antenna (cm) 0 0.5 1 1.5 2 2.5 Error of touch position (mm) Fig. 23. Touch position accuracy with different depth -45 -30 -15 0 15 30 45 Different angles (deg) 0 1 2 3 4 5 6 Error of touch position (mm) Fig. 24. Touch position accuracy with different angles bracelet ring wristband watch none Different jewelry 0 2 4 6 8 Error of touch position (mm) Fig. 25. Touch position accuracy with different jewelry user1 user2 user3 user4 user5 user6 Different users 0 2 4 6 8 Error of touch position (mm) Fig. 26. Touch position accuracy with different users 0 2 4 6 8 10 Error of touch position (mm) 0 0.2 0.4 0.6 0.8 1 CDF Slow Normal Fast Fig. 27. Touch position accuracy with different speeds 0 2 468 10 Error of touch position (mm) 0 0.2 0.4 0.6 0.8 1 CDF E51 AZ9640 AZ9662 Fig. 28. Touch position accuracy with different tags Control Pane Baseline Drawing line via movement Adjust via touch User Interface Operation Touch Buttons Slider Move Fig. 29. Prototype system of RF-Dial: a functional drawing sample application the error increases as well and achieves 4.92mm when the angle is −45◦ , which is still acceptable compared with the half tag length of around 4cm. This is because that although the extracted RSSI deviation should be independent of the polarization angle, the tag’s received signal caused by the multi-path changes during the rotation, such that, the extracted RSSI deviation contains influence of both the coupling effect and the multi-path effect. Despite our solution is not as robust to angle as to distance, the average accuracy is satisfying of less than 4mm within rotation angle of 45◦ . Wearing Jewelry: The touch detection is insensitive to the wearing jewelry of the user. We let the users wear different jewelry on the operation hand to evaluate the effect of wearing jewelry, including the crystal bracelet, metal ring, smart wristband, and mechanical watch. The template is generated with the data without jewelry. The results are shown in Fig. 25, the average errors for different jewelry are within [1.09, 1.56]mm, so wearing jewelry will not bring huge influence on accuracy. It is probably because that the jewelry will not change the human impedance significantly. User: Different users can share the same template with the average error below 2.7mm. We selected six users, i.e., two females (user1 and user3) and four males, to evaluate whether a general template can be shared with different users. User1 is required to perform the swipe more three times than other users, based on which we generated the template. Fig. 26 plots the error of touch position with different users. We can find that the template is robust to different users and unrelated to the gender. The accuracy of user1 herself is the highest, with the average distance error of 1.1mm. Even in the worst case (user6), we can still achieve the high accuracy with the error less than 2.7mm. It is because that different people have different impedance, but such difference is small enough, allowing us to use a general template for monitoring the touch gesture of different users. Speed: The swipe speed has little influence on the accuracy of touch detection. We swiped on the tag with three different speeds: slow (less than 15mm/s), normal (15-20mm/s), fast (larger than 20mm/s). The generated template is based on the swipe data of normal speed. Fig. 27 plots the CDF of the touch position error with different speeds. 90 percent of errors with slow, normal and fast speed are 2.83, 2.09, and 4.52mm, respectively. It is because that the finger gesture has small difference for different speeds, i.e., the touch angle of the finger on the tag, the touch area. Meanwhile, our results are calculated with the assumption that the captured position from OptiTrack is absolutely accurate, but in fact, when we swipe fast, the finger tracking accuracy will decrease, which degrades our accuracy to some extent. Tag Type: Different kinds of linear dipole tags can be used as the touch tag. We tried three kinds of tags: E51, AZ9640, and AZ9662, which are all linear dipole tag as shown in Fig. 20. They vary in terms of the length of meandered lines and the chip type. For the meandered line length, E51 ≈ AZ9640 > AZ9662. The chip of either AZ9640 or AZ9662 is H3/H4, while the chip of E51 is M5. The CDF of touch position error in Fig. 28 indicates that these three tag types have the potential to be a reliable touch interface. Although E51 almost has the same size as AZ9640, their chips are different, so AZ9640 performs better. Tag AZ9662 does not perform as well as others, which is likely because of its shorter meandered line, but it still has a high accuracy of error less than 5.7mm for 90 percentile estimations. Overall, a linear dipole tag with the suitable chip and long meandered lines in the antenna could be a good choice for the touch tag. 9.4 Case Study: A Functional Drawing Application In this section, we implemented a prototype system of RFDial to provide an functional drawing sample application. Fig. 29 shows the experiment setup and user interface of RF-Dial. This way, we turned the ordinary candy box into an intelligent interaction device. The size of the used candy box is about 13×4.5×10cm3 , so it is comfortable for the user to operate with the tagged box. We attach four AZ9640 tags on two side faces together with an E51 tag on the top face. The tag separation distance on the same side face is about 10cm, and the height difference between the tags on the top face and the side face is about 8cm. Technically, RF-Dial tracks