正在加载图片...
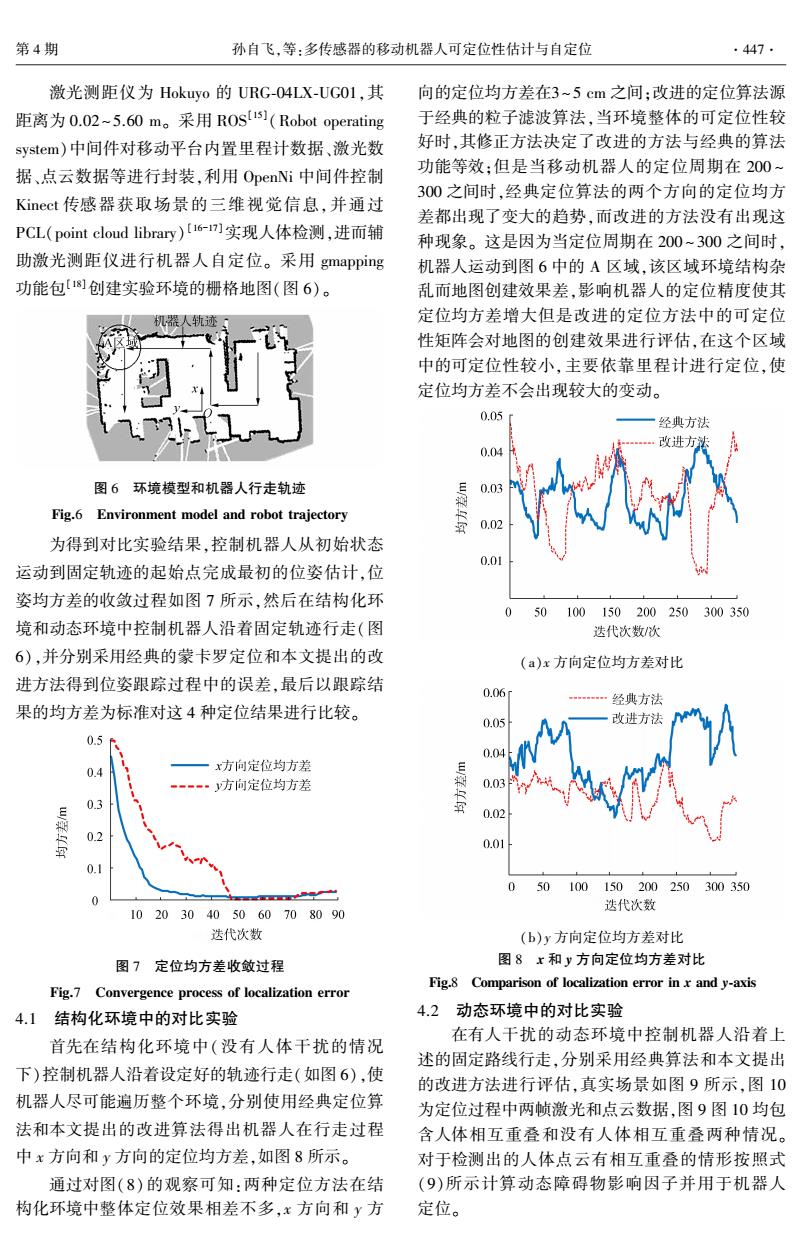
第4期 孙自飞,等:多传感器的移动机器人可定位性估计与自定位 ·447. 激光测距仪为Hokuyo的URG-04LX-UG01,其 向的定位均方差在3~5cm之间:改进的定位算法源 距离为0.02-5.60m。采用R0s1(Robot operating 于经典的粒子滤波算法,当环境整体的可定位性较 system)中间件对移动平台内置里程计数据、激光数 好时,其修正方法决定了改进的方法与经典的算法 功能等效:但是当移动机器人的定位周期在200~ 据、点云数据等进行封装,利用OpenNi中间件控制 300之间时,经典定位算法的两个方向的定位均方 Kinect传感器获取场景的三维视觉信息,并通过 差都出现了变大的趋势,而改进的方法没有出现这 PCL(point cloud library)【1-)实现人体检测,进而辅 种现象。这是因为当定位周期在200~300之间时, 助激光测距仪进行机器人自定位。采用gmapping 机器人运动到图6中的A区域,该区域环境结构杂 功能包1]创建实验环境的栅格地图(图6)。 乱而地图创建效果差,影响机器人的定位精度使其 人轨迹 定位均方差增大但是改进的定位方法中的可定位 性矩阵会对地图的创建效果进行评估,在这个区域 中的可定位性较小,主要依靠里程计进行定位,使 定位均方差不会出现较大的变动。 0.05 一经典方法 …改进方 0.04 图6环境模型和机器人行走轨迹 0.03 Fig.6 Environment model and robot trajectory 0.02 为得到对比实验结果,控制机器人从初始状态 0.01 运动到固定轨迹的起始点完成最初的位姿估计,位 姿均方差的收敛过程如图7所示,然后在结构化环 100150200250300350 境和动态环境中控制机器人沿着固定轨迹行走(图 迭代次数/次 6),并分别采用经典的蒙卡罗定位和本文提出的改 (a)x方向定位均方差对比 进方法得到位姿跟踪过程中的误差,最后以跟踪结 0.06 经典方法 果的均方差为标准对这4种定位结果进行比较。 0.05 改进方法 0.5 0.04 0.4 一x方向定位均方差 --一-·y方向定位均方差 0.03 0.3 0.02 0.2 0.01 0.1 050100150200250.300350 迭代次数 102030405060708090 选代次数 (b)y方向定位均方差对比 图7定位均方差收敛过程 图8x和y方向定位均方差对比 Fig.8 Comparison of localization error in x and y-axis Fig.7 Convergence process of localization error 4.1结构化环境中的对比实验 4.2动态环境中的对比实验 在有人干扰的动态环境中控制机器人沿着上 首先在结构化环境中(没有人体干扰的情况 述的固定路线行走,分别采用经典算法和本文提出 下)控制机器人沿着设定好的轨迹行走(如图6),使 的改进方法进行评估,真实场景如图9所示,图10 机器人尽可能遍历整个环境,分别使用经典定位算 为定位过程中两帧激光和点云数据,图9图10均包 法和本文提出的改进算法得出机器人在行走过程 含人体相互重叠和没有人体相互重叠两种情况。 中x方向和y方向的定位均方差,如图8所示。 对于检测出的人体点云有相互重叠的情形按照式 通过对图(8)的观察可知:两种定位方法在结 (9)所示计算动态障碍物影响因子并用于机器人 构化环境中整体定位效果相差不多,x方向和y方 定位。激光测距仪为 Hokuyo 的 URG⁃04LX⁃UG01,其 距离为 0.02~5.60 m。 采用 ROS [15] (Robot operating system)中间件对移动平台内置里程计数据、激光数 据、点云数据等进行封装,利用 OpenNi 中间件控制 Kinect 传感器获取场景的三维视觉信息,并通过 PCL(point cloud library) [16-17]实现人体检测,进而辅 助激光测距仪进行机器人自定位。 采用 gmapping 功能包[18]创建实验环境的栅格地图(图 6)。 图 6 环境模型和机器人行走轨迹 Fig.6 Environment model and robot trajectory 为得到对比实验结果,控制机器人从初始状态 运动到固定轨迹的起始点完成最初的位姿估计,位 姿均方差的收敛过程如图 7 所示,然后在结构化环 境和动态环境中控制机器人沿着固定轨迹行走(图 6),并分别采用经典的蒙卡罗定位和本文提出的改 进方法得到位姿跟踪过程中的误差,最后以跟踪结 果的均方差为标准对这 4 种定位结果进行比较。 图 7 定位均方差收敛过程 Fig.7 Convergence process of localization error 4.1 结构化环境中的对比实验 首先在结构化环境中(没有人体干扰的情况 下)控制机器人沿着设定好的轨迹行走(如图 6),使 机器人尽可能遍历整个环境,分别使用经典定位算 法和本文提出的改进算法得出机器人在行走过程 中 x 方向和 y 方向的定位均方差,如图 8 所示。 通过对图(8)的观察可知:两种定位方法在结 构化环境中整体定位效果相差不多,x 方向和 y 方 向的定位均方差在3~5 cm 之间;改进的定位算法源 于经典的粒子滤波算法,当环境整体的可定位性较 好时,其修正方法决定了改进的方法与经典的算法 功能等效;但是当移动机器人的定位周期在 200 ~ 300 之间时,经典定位算法的两个方向的定位均方 差都出现了变大的趋势,而改进的方法没有出现这 种现象。 这是因为当定位周期在 200 ~ 300 之间时, 机器人运动到图 6 中的 A 区域,该区域环境结构杂 乱而地图创建效果差,影响机器人的定位精度使其 定位均方差增大但是改进的定位方法中的可定位 性矩阵会对地图的创建效果进行评估,在这个区域 中的可定位性较小,主要依靠里程计进行定位,使 定位均方差不会出现较大的变动。 (a)x 方向定位均方差对比 (b)y 方向定位均方差对比 图 8 x 和 y 方向定位均方差对比 Fig.8 Comparison of localization error in x and y⁃axis 4.2 动态环境中的对比实验 在有人干扰的动态环境中控制机器人沿着上 述的固定路线行走,分别采用经典算法和本文提出 的改进方法进行评估,真实场景如图 9 所示,图 10 为定位过程中两帧激光和点云数据,图 9 图 10 均包 含人体相互重叠和没有人体相互重叠两种情况。 对于检测出的人体点云有相互重叠的情形按照式 (9)所示计算动态障碍物影响因子并用于机器人 定位。 第 4 期 孙自飞,等:多传感器的移动机器人可定位性估计与自定位 ·447·