正在加载图片...
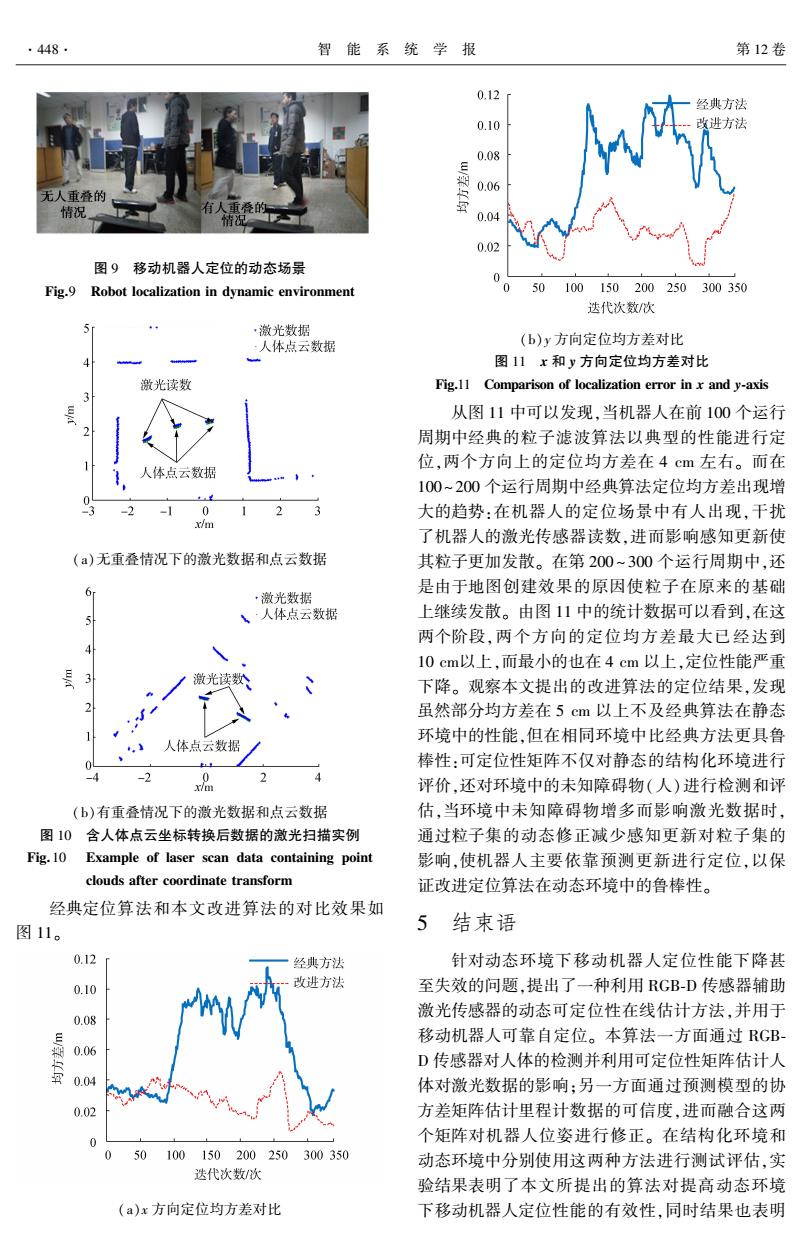
·448 智能系统学报 第12卷 0.12 经典方法 0.10 进方法 0.08 0.06 无人重叠的 情况 有人重叠的 0.04 0.02 图9移动机器人定位的动态场景 Fig.9 Robot localization in dynamic environment 50 100150.200250300350 迭代次数次 ·激光数据 ·人体点云数据 (b)y方向定位均方差对比 图11x和y方向定位均方差对比 激光读数 Fig.11 Comparison of localization error in x and y-axis 从图11中可以发现,当机器人在前100个运行 周期中经典的粒子滤波算法以典型的性能进行定 人体点云数据 位,两个方向上的定位均方差在4cm左右。而在 100~200个运行周期中经典算法定位均方差出现增 0 大的趋势:在机器人的定位场景中有人出现,干扰 x/m 了机器人的激光传感器读数,进而影响感知更新使 (a)无重叠情况下的激光数据和点云数据 其粒子更加发散。在第200~300个运行周期中,还 6 是由于地图创建效果的原因使粒子在原来的基础 ·激光数据 、·人体点云数据 上继续发散。由图11中的统计数据可以看到,在这 两个阶段,两个方向的定位均方差最大已经达到 10cm以上,而最小的也在4cm以上,定位性能严重 激光读数 下降。观察本文提出的改进算法的定位结果,发现 虽然部分均方差在5cm以上不及经典算法在静态 环境中的性能,但在相同环境中比经典方法更具鲁 人体点云数据 棒性:可定位性矩阵不仅对静态的结构化环境进行 2 0 x/m 评价,还对环境中的未知障碍物(人)进行检测和评 (b)有重叠情况下的激光数据和点云数据 估,当环境中未知障碍物增多而影响激光数据时, 图10含人体点云坐标转换后数据的激光扫描实例 通过粒子集的动态修正减少感知更新对粒子集的 Fig.10 Example of laser scan data containing point 影响,使机器人主要依靠预测更新进行定位,以保 clouds after coordinate transform 证改进定位算法在动态环境中的鲁棒性。 经典定位算法和本文改进算法的对比效果如 图11。 5结束语 0.12 经典方法 针对动态环境下移动机器人定位性能下降甚 0.10 改进方法 至失效的问题,提出了一种利用RGB-D传感器辅助 激光传感器的动态可定位性在线估计方法,并用于 0.08 E 移动机器人可靠自定位。本算法一方面通过RGB 0.06 D传感器对人体的检测并利用可定位性矩阵估计人 0.04 体对激光数据的影响:另一方面通过预测模型的协 0.02 方差矩阵估计里程计数据的可信度,进而融合这两 个矩阵对机器人位姿进行修正。在结构化环境和 50 100150200250 300350 动态环境中分别使用这两种方法进行测试评估,实 迭代次数/次 验结果表明了本文所提出的算法对提高动态环境 (a)x方向定位均方差对比 下移动机器人定位性能的有效性,同时结果也表明图 9 移动机器人定位的动态场景 Fig.9 Robot localization in dynamic environment (a)无重叠情况下的激光数据和点云数据 (b)有重叠情况下的激光数据和点云数据 图 10 含人体点云坐标转换后数据的激光扫描实例 Fig.10 Example of laser scan data containing point clouds after coordinate transform 经典定位算法和本文改进算法的对比效果如 图 11。 (a)x 方向定位均方差对比 (b)y 方向定位均方差对比 图 11 x 和 y 方向定位均方差对比 Fig.11 Comparison of localization error in x and y⁃axis 从图 11 中可以发现,当机器人在前 100 个运行 周期中经典的粒子滤波算法以典型的性能进行定 位,两个方向上的定位均方差在 4 cm 左右。 而在 100~200 个运行周期中经典算法定位均方差出现增 大的趋势:在机器人的定位场景中有人出现,干扰 了机器人的激光传感器读数,进而影响感知更新使 其粒子更加发散。 在第 200 ~ 300 个运行周期中,还 是由于地图创建效果的原因使粒子在原来的基础 上继续发散。 由图 11 中的统计数据可以看到,在这 两个阶段,两个方向的定位均方差最大已经达到 10 cm以上,而最小的也在 4 cm 以上,定位性能严重 下降。 观察本文提出的改进算法的定位结果,发现 虽然部分均方差在 5 cm 以上不及经典算法在静态 环境中的性能,但在相同环境中比经典方法更具鲁 棒性:可定位性矩阵不仅对静态的结构化环境进行 评价,还对环境中的未知障碍物(人)进行检测和评 估,当环境中未知障碍物增多而影响激光数据时, 通过粒子集的动态修正减少感知更新对粒子集的 影响,使机器人主要依靠预测更新进行定位,以保 证改进定位算法在动态环境中的鲁棒性。 5 结束语 针对动态环境下移动机器人定位性能下降甚 至失效的问题,提出了一种利用 RGB⁃D 传感器辅助 激光传感器的动态可定位性在线估计方法,并用于 移动机器人可靠自定位。 本算法一方面通过 RGB⁃ D 传感器对人体的检测并利用可定位性矩阵估计人 体对激光数据的影响;另一方面通过预测模型的协 方差矩阵估计里程计数据的可信度,进而融合这两 个矩阵对机器人位姿进行修正。 在结构化环境和 动态环境中分别使用这两种方法进行测试评估,实 验结果表明了本文所提出的算法对提高动态环境 下移动机器人定位性能的有效性,同时结果也表明 ·448· 智 能 系 统 学 报 第 12 卷