正在加载图片...
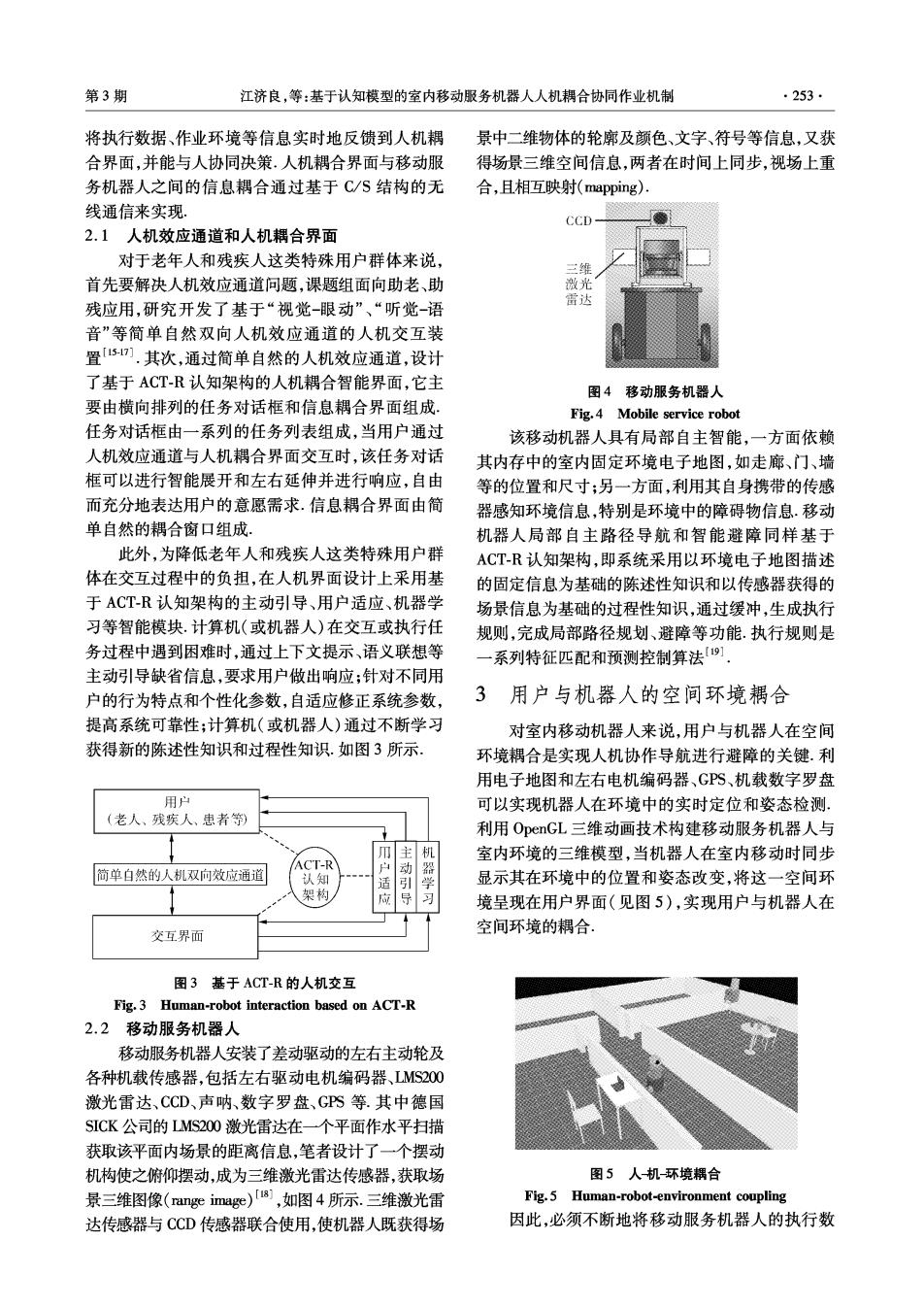
第3期 江济良,等:基于认知模型的室内移动服务机器人人机耦合协同作业机制 ·253· 将执行数据、作业环境等信息实时地反馈到人机耦 景中二维物体的轮廓及颜色、文字、符号等信息,又获 合界面,并能与人协同决策.人机耦合界面与移动服 得场景三维空间信息,两者在时间上同步,视场上重 务机器人之间的信息耦合通过基于C/S结构的无 合,且相互映射(mapping). 线通信来实现. CCD 2.1人机效应通道和人机耦合界面 对于老年人和残疾人这类特殊用户群体来说, 首先要解决人机效应通道问题,课题组面向助老、助 激光 残应用,研究开发了基于“视觉-眼动”、“听觉-语 雷达 音”等简单自然双向人机效应通道的人机交互装 置[5).其次,通过简单自然的人机效应通道,设计 了基于ACT-R认知架构的人机耦合智能界面,它主 图4移动服务机器人 要由横向排列的任务对话框和信息耦合界面组成。 Fig.4 Mobile service robot 任务对话框由一系列的任务列表组成,当用户通过 该移动机器人具有局部自主智能,一方面依赖 人机效应通道与人机耦合界面交互时,该任务对话 其内存中的室内固定环境电子地图,如走廊、门、墙 框可以进行智能展开和左右延伸并进行响应,自由 等的位置和尺寸;另一方面,利用其自身携带的传感 而充分地表达用户的意愿需求.信息耦合界面由简 器感知环境信息,特别是环境中的障碍物信息.移动 单自然的耦合窗口组成。 机器人局部自主路径导航和智能避障同样基于 此外,为降低老年人和残疾人这类特殊用户群 ACT-R认知架构,即系统采用以环境电子地图描述 体在交互过程中的负担,在人机界面设计上采用基 的固定信息为基础的陈述性知识和以传感器获得的 于ACT-R认知架构的主动引导、用户适应、机器学 场景信息为基础的过程性知识,通过缓冲,生成执行 习等智能模块.计算机(或机器人)在交互或执行任 规则,完成局部路径规划、避障等功能.执行规则是 务过程中遇到困难时,通过上下文提示、语义联想等 一系列特征匹配和预测控制算法19] 主动引导缺省信息,要求用户做出响应;针对不同用 户的行为特点和个性化参数,自适应修正系统参数, 3用户与机器人的空间环境耦合 提高系统可靠性;计算机(或机器人)通过不断学习 对室内移动机器人来说,用户与机器人在空间 获得新的陈述性知识和过程性知识.如图3所示. 环境耦合是实现人机协作导航进行避障的关键.利 用电子地图和左右电机编码器、GS、机载数字罗盘 用户 可以实现机器人在环境中的实时定位和姿态检测. (老人、残疾人、患者等 利用OpenGL三维动画技术构建移动服务机器人与 刀主机 室内环境的三维模型,当机器人在室内移动时同步 ACT-R 简单白然的人机双向效应通道 认知 翠 显示其在环境中的位置和姿态改变,将这一空间环 架构 户适应 动引导 境呈现在用户界面(见图5),实现用户与机器人在 交互界面 空间环境的耦合. 图3基于ACT-R的人机交互 Fig.3 Human-robot interaction based on ACT-R 2.2移动服务机器人 移动服务机器人安装了差动驱动的左右主动轮及 各种机载传感器,包括左右驱动电机编码器、LMS200 激光雷达、CCD、声呐、数字罗盘、GPS等.其中德国 SICK公司的MS2O0激光雷达在一个平面作水平扫描 获取该平面内场景的距离信息,笔者设计了一个摆动 机构使之俯仰摆动,成为三维激光雷达传感器,获取场 图5人机环境耦合 景三维图像(range image)[8,如图4所示.三维激光雷 Fig.5 Human-robot-environment coupling 达传感器与CCD传感器联合使用,使机器人既获得场 因此,必须不断地将移动服务机器人的执行数