正在加载图片...
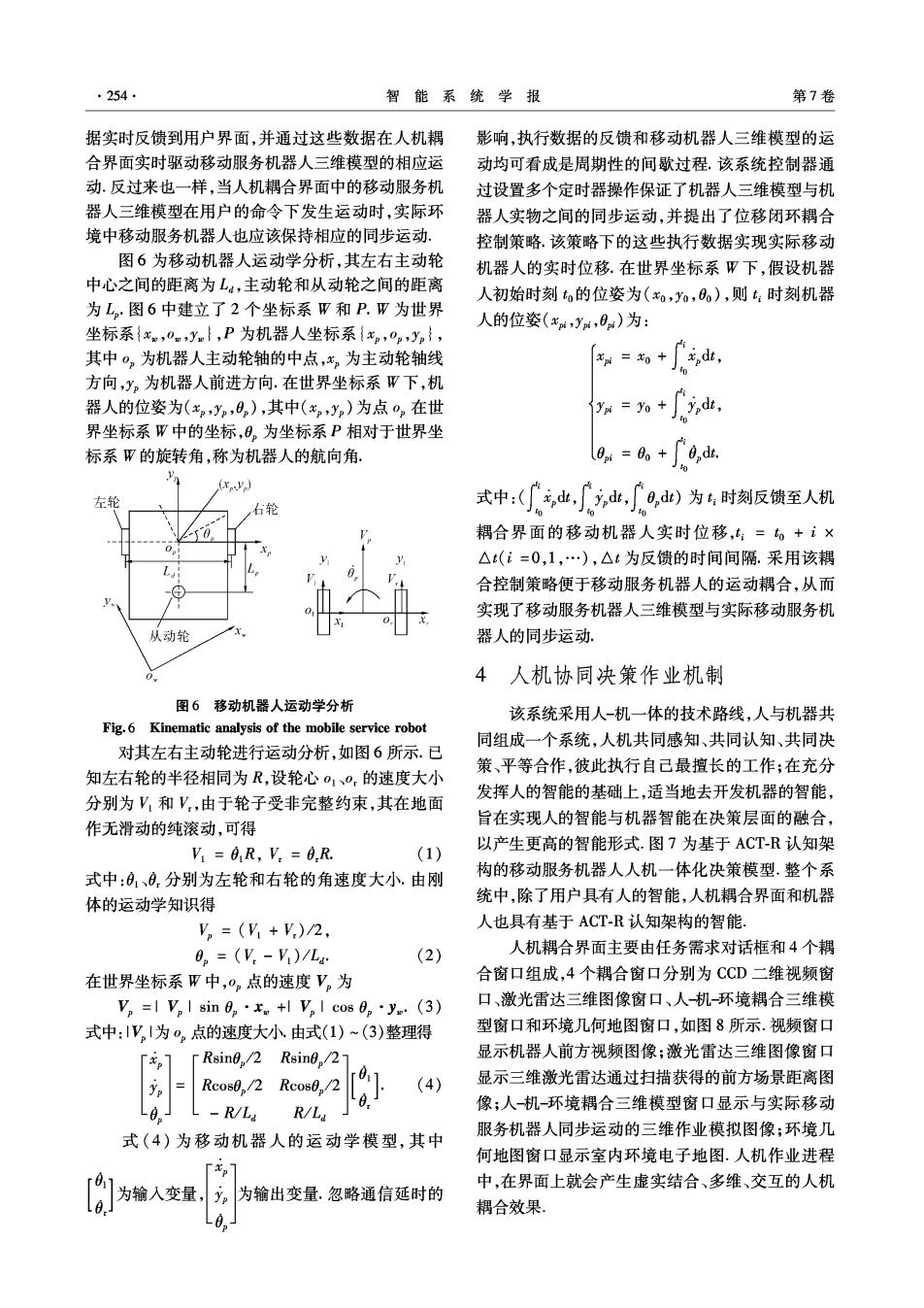
254 智能系统学报 第7卷 据实时反馈到用户界面,并通过这些数据在人机耦 影响,执行数据的反馈和移动机器人三维模型的运 合界面实时驱动移动服务机器人三维模型的相应运 动均可看成是周期性的间歇过程.该系统控制器通 动.反过来也一样,当人机耦合界面中的移动服务机 过设置多个定时器操作保证了机器人三维模型与机 器人三维模型在用户的命令下发生运动时,实际环 器人实物之间的同步运动,并提出了位移闭环耦合 境中移动服务机器人也应该保持相应的同步运动. 控制策略.该策略下的这些执行数据实现实际移动 图6为移动机器人运动学分析,其左右主动轮 机器人的实时位移.在世界坐标系W下,假设机器 中心之间的距离为L,主动轮和从动轮之间的距离 人初始时刻的位姿为(xo,yo,),则时刻机器 为L,·图6中建立了2个坐标系W和P.W为世界 人的位姿(xyu,0)为: 坐标系{x。,0m,yn,P为机器人坐标系{xp,0p,yp}, 其中0,为机器人主动轮轴的中点,x,为主动轮轴线 =+线d, 方向,y。为机器人前进方向.在世界坐标系W下,机 器人的位姿为(x,y,0,),其中(,y,)为点0,在世 =yo+dt, 界坐标系W中的坐标,0。为坐标系P相对于世界坐 标系W的旋转角,称为机器人的航向角. 0n=0o+0,dt. (x.V) 左轮 石轮 式中:小小3,d为时刻反馈至人机 耦合界面的移动机器人实时位移,:=。+i× △t(i=0,1,…),△t为反馈的时间间隔.采用该耦 合控制策略便于移动服务机器人的运动耦合,从而 实现了移动服务机器人三维模型与实际移动服务机 从动轮 器人的同步运动, 4人机协同决策作业机制 图6移动机器人运动学分析 该系统采用人-机一体的技术路线,人与机器共 Fig.6 Kinematic analysis of the mobile service robot 同组成一个系统,人机共同感知、共同认知、共同决 对其左右主动轮进行运动分析,如图6所示.已 策、平等合作,彼此执行自己最擅长的工作;在充分 知左右轮的半径相同为R,设轮心01、0,的速度大小 发挥人的智能的基础上,适当地去开发机器的智能, 分别为V和V,由于轮子受非完整约束,其在地面 作无滑动的纯滚动,可得 旨在实现人的智能与机器智能在决策层面的融合, V=0R,V.=0R. (1) 以产生更高的智能形式.图7为基于ACT-R认知架 式中:0、0分别为左轮和右轮的角速度大小.由刚 构的移动服务机器人人机一体化决策模型.整个系 体的运动学知识得 统中,除了用户具有人的智能,人机耦合界面和机器 V,=(V+V,)/2, 人也具有基于ACT-R认知架构的智能, 0。=(V.-V)/La (2) 人机耦合界面主要由任务需求对话框和4个耦 在世界坐标系W中,0。点的速度V。为 合窗口组成,4个耦合窗口分别为CCD二维视频窗 V。=lVp|sin6。·xn+lV2lcos0。·ym:(3) 口、激光雷达三维图像窗口、人机-环境耦合三维模 式中:1V,为o。点的速度大小,由式(1)~(3)整理得 型窗口和环境几何地图窗口,如图8所示.视频窗口 Rsin0,/2 Rsine,/27 显示机器人前方视频图像:激光雷达三维图像窗口 Rcos0,/2 Rcos0,/2 01 (4) 显示三维激光雷达通过扫描获得的前方场景距离图 L0 R/L R/L 像;人机-环境耦合三维模型窗口显示与实际移动 式(4)为移动机器人的运动学模型,其中 服务机器人同步运动的三维作业模拟图像;环境几 何地图窗口显示室内环境电子地图.人机作业进程 中,在界面上就会产生虚实结合、多维、交互的人机 为输人变量 为输出变量.忽略通信延时的 耦合效果