正在加载图片...
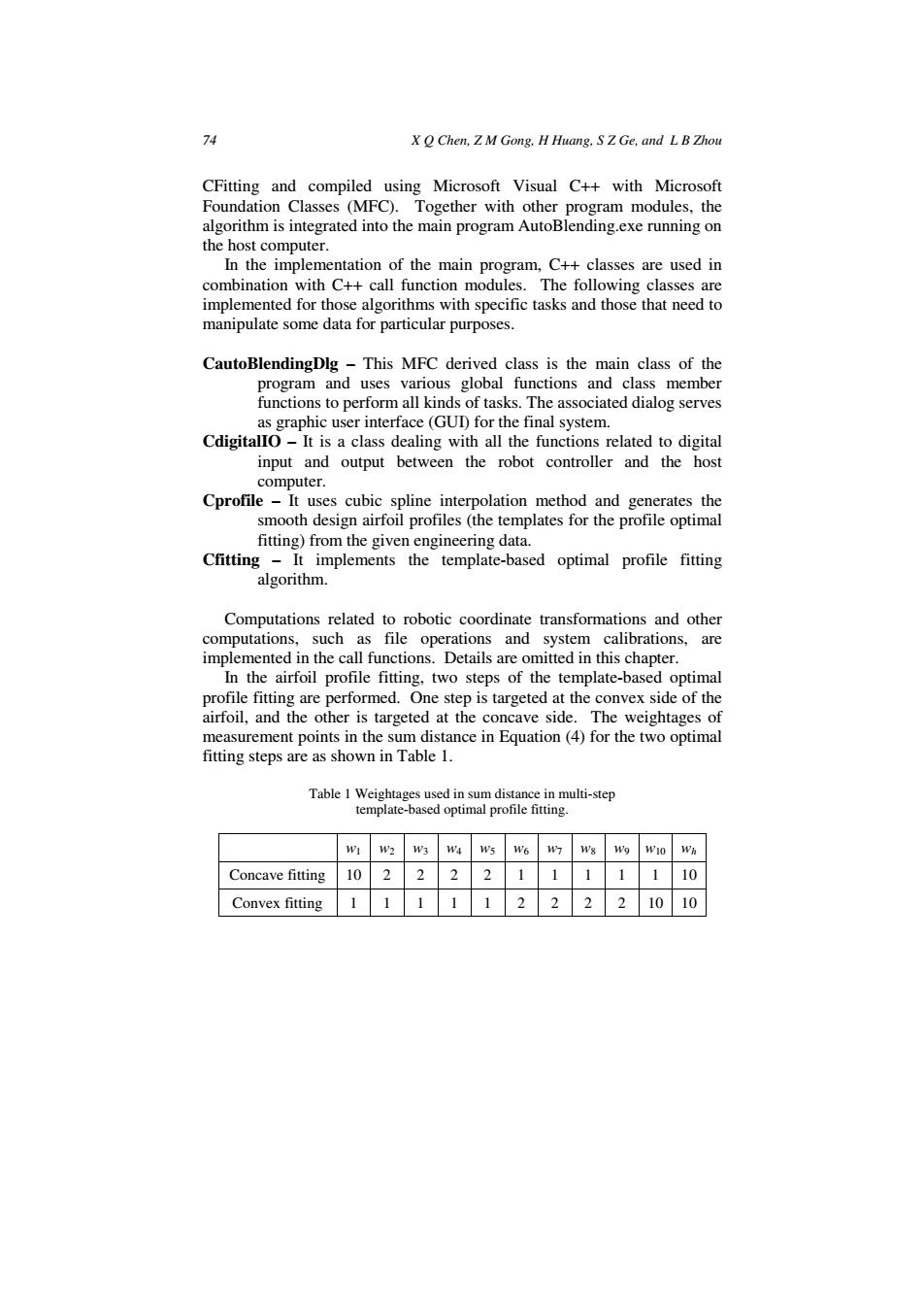
74 X O Chen,Z M Gong,H Huang.S Z Ge,and L B Zhou CFitting and compiled using Microsoft Visual C++with Microsoft Foundation Classes (MFC).Together with other program modules,the algorithm is integrated into the main program AutoBlending.exe running on the host computer. In the implementation of the main program,C++classes are used in combination with C++call function modules.The following classes are implemented for those algorithms with specific tasks and those that need to manipulate some data for particular purposes. CautoBlendingDlg-This MFC derived class is the main class of the program and uses various global functions and class member functions to perform all kinds of tasks.The associated dialog serves as graphic user interface(GUD)for the final system. CdigitallO-It is a class dealing with all the functions related to digital input and output between the robot controller and the host computer. Cprofile -It uses cubic spline interpolation method and generates the smooth design airfoil profiles(the templates for the profile optimal fitting)from the given engineering data. Cfitting -It implements the template-based optimal profile fitting algorithm. Computations related to robotic coordinate transformations and other computations,such as file operations and system calibrations,are implemented in the call functions.Details are omitted in this chapter. In the airfoil profile fitting,two steps of the template-based optimal profile fitting are performed.One step is targeted at the convex side of the airfoil,and the other is targeted at the concave side.The weightages of measurement points in the sum distance in Equation (4)for the two optimal fitting steps are as shown in Table 1. Table 1 Weightages used in sum distance in multi-step template-based optimal profile fitting. WI W2 W3 W4 W67 Wg Concave fitting 10 2 2 1 1 1 110 Convex fitting 2 2 2 2 101074 X Q Chen, Z M Gong, H Huang, S Z Ge, and L B Zhou CFitting and compiled using Microsoft Visual C++ with Microsoft Foundation Classes (MFC). Together with other program modules, the algorithm is integrated into the main program AutoBlending.exe running on the host computer. In the implementation of the main program, C++ classes are used in combination with C++ call function modules. The following classes are implemented for those algorithms with specific tasks and those that need to manipulate some data for particular purposes. CautoBlendingDlg – This MFC derived class is the main class of the program and uses various global functions and class member functions to perform all kinds of tasks. The associated dialog serves as graphic user interface (GUI) for the final system. CdigitalIO – It is a class dealing with all the functions related to digital input and output between the robot controller and the host computer. Cprofile – It uses cubic spline interpolation method and generates the smooth design airfoil profiles (the templates for the profile optimal fitting) from the given engineering data. Cfitting – It implements the template-based optimal profile fitting algorithm. Computations related to robotic coordinate transformations and other computations, such as file operations and system calibrations, are implemented in the call functions. Details are omitted in this chapter. In the airfoil profile fitting, two steps of the template-based optimal profile fitting are performed. One step is targeted at the convex side of the airfoil, and the other is targeted at the concave side. The weightages of measurement points in the sum distance in Equation (4) for the two optimal fitting steps are as shown in Table 1. Table 1 Weightages used in sum distance in multi-step template-based optimal profile fitting. w1 w2 w3 w4 w5 w6 w7 w8 w9 w10 wh Concave fitting 10 2 2 2 2 1 1 1 1 1 10 Convex fitting 1 1 1 1 1 2 2 2 2 10 10