正在加载图片...
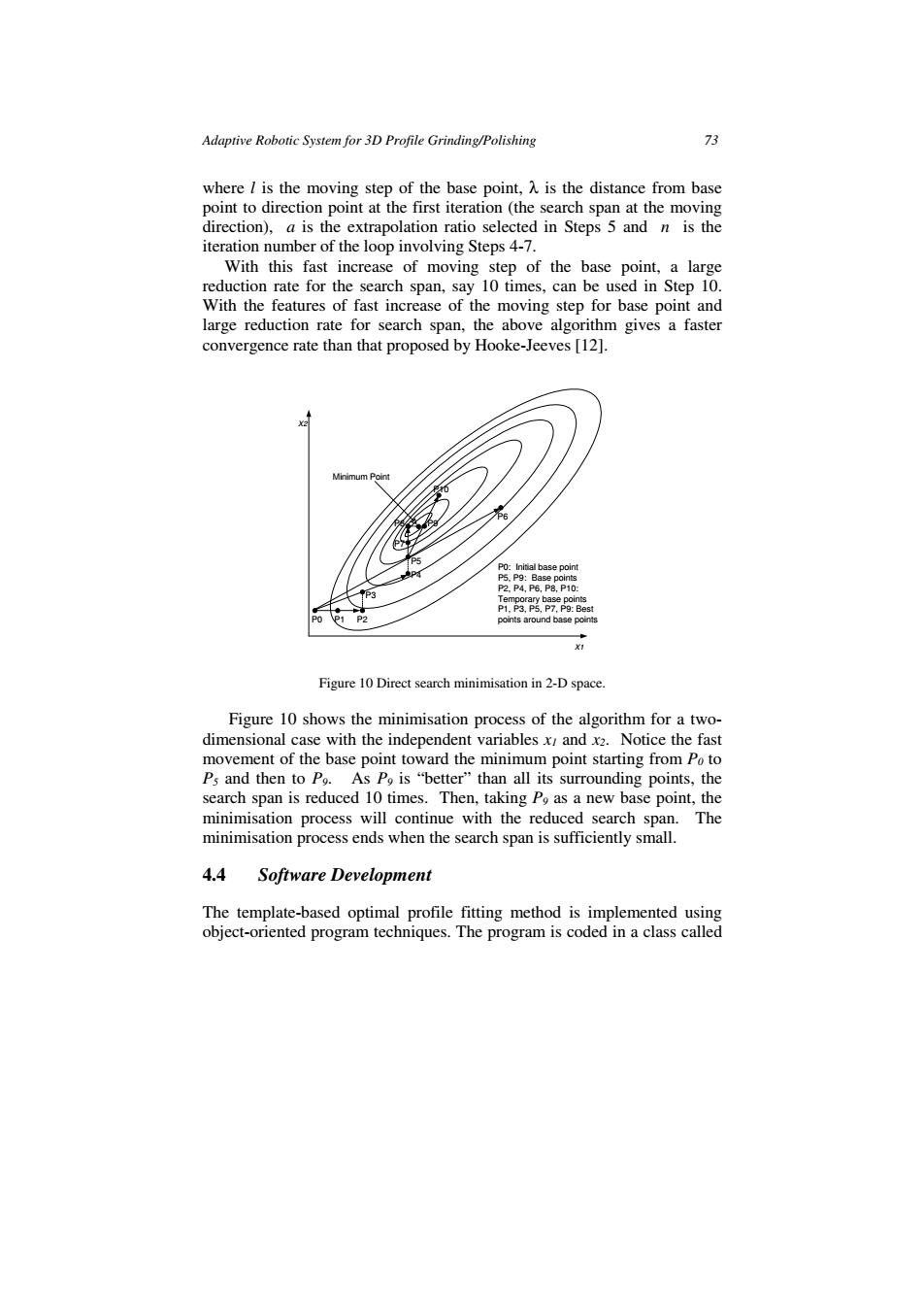
Adaptive Robotic System for 3D Profile Grinding/Polishing 73 where is the moving step of the base point,A is the distance from base point to direction point at the first iteration (the search span at the moving direction),a is the extrapolation ratio selected in Steps 5 and n is the iteration number of the loop involving Steps 4-7. With this fast increase of moving step of the base point,a large reduction rate for the search span,say 10 times,can be used in Step 10. With the features of fast increase of the moving step for base point and large reduction rate for search span,the above algorithm gives a faster convergence rate than that proposed by Hooke-Jeeves [12]. num P Po:Initial base point P5.P9:Base points P2.P4,P6.P8.P1D 0 points around base points Figure 10 Direct search minimisation in 2-D space Figure 10 shows the minimisation process of the algorithm for a two- dimensional case with the independent variables x and x2.Notice the fast movement of the base point toward the minimum point starting from Po to Ps and then to P.As Po is "better"than all its surrounding points,the search span is reduced 10 times.Then,taking Po as a new base point,the minimisation process will continue with the reduced search span.The minimisation process ends when the search span is sufficiently small. 4.4 Software Development The template-based optimal profile fitting method is implemented using object-oriented program techniques.The program is coded in a class calledAdaptive Robotic System for 3D Profile Grinding/Polishing 73 where l is the moving step of the base point, λ is the distance from base point to direction point at the first iteration (the search span at the moving direction), a is the extrapolation ratio selected in Steps 5 and n is the iteration number of the loop involving Steps 4-7. With this fast increase of moving step of the base point, a large reduction rate for the search span, say 10 times, can be used in Step 10. With the features of fast increase of the moving step for base point and large reduction rate for search span, the above algorithm gives a faster convergence rate than that proposed by Hooke-Jeeves [12]. P0: Initial base point P5, P9: Base points P2, P4, P6, P8, P10: Temporary base points P1, P3, P5, P7, P9: Best points around base points P6 P0 P1 P2 P3 P4 P5 P8 P7 P9 P10 x2 x1 Minimum Point Figure 10 Direct search minimisation in 2-D space. Figure 10 shows the minimisation process of the algorithm for a twodimensional case with the independent variables x1 and x2. Notice the fast movement of the base point toward the minimum point starting from P0 to P5 and then to P9. As P9 is “better” than all its surrounding points, the search span is reduced 10 times. Then, taking P9 as a new base point, the minimisation process will continue with the reduced search span. The minimisation process ends when the search span is sufficiently small. 4.4 Software Development The template-based optimal profile fitting method is implemented using object-oriented program techniques. The program is coded in a class called