正在加载图片...
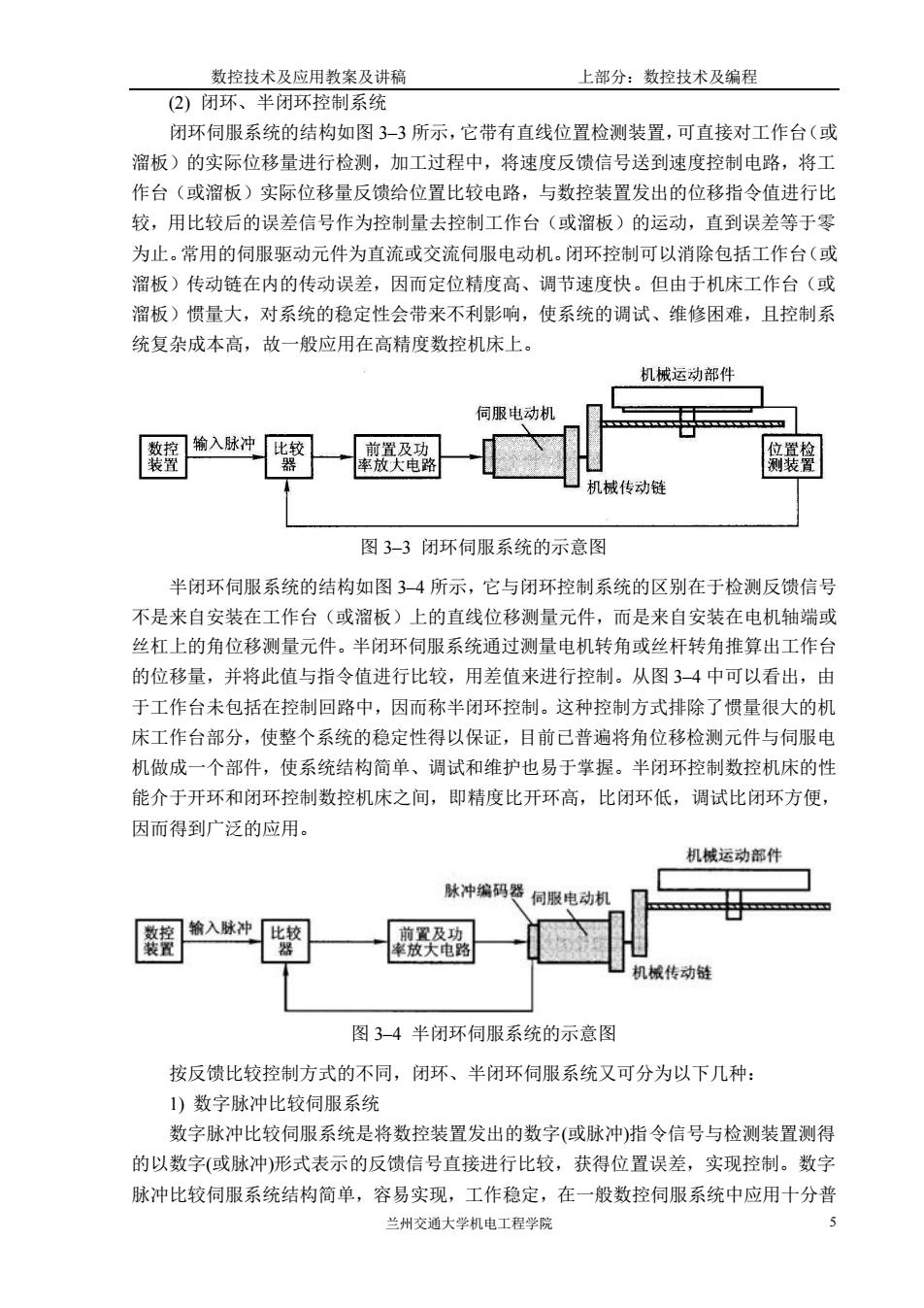
数控技术及应用教案及讲稿 上部分:数控技术及编程 (2)闭环、半闭环控制系统 闭环伺服系统的结构如图3-3所示,它带有直线位置检测装置,可直接对工作台(或 溜板)的实际位移量进行检测,加工过程中,将速度反馈信号送到速度控制电路,将工 作台(或溜板)实际位移量反馈给位置比较电路,与数控装置发出的位移指令值进行比 较,用比较后的误差信号作为控制量去控制工作台(或溜板)的运动,直到误差等于零 为止。常用的伺服驱动元件为直流或交流同服电动机。闭环控制可以消除包括工作台(或 溜板)传动链在内的传动误差,因而定位精度高、调节速度快。但由于机床工作台(或 溜板)惯量大,对系统的稳定性会带来不利影响,使系统的调试、维修困难,且控制系 统复杂成本高,故一般应用在高精度数控机床上。 机械运动部件 伺服电动机 机械传动链 图3-3闭环伺服系统的示意图 半闭环伺服系统的结构如图34所示,它与闭环控制系统的区别在于检测反馈信号 不是来自安装在工作台(或溜板)上的直线位移测量元件,而是来自安装在电机轴端或 丝杠上的角位移测量元件。半闭环伺服系统通过测量电机转角或丝杆转角推算出工作台 的位移量,并将此值与指令值进行比较,用差值来进行控制。从图34中可以看出,由 于工作台未包括在控制回路中,因而称半闭环控制。这种控制方式排除了惯量很大的机 床工作台部分,使整个系统的稳定性得以保证,目前己普遍将角位移检测元件与伺服电 机做成一个部件,使系统结构简单、调试和维护也易于掌握。半闭环控制数控机床的性 能介于开环和闭环控制数控机床之间,即精度比开环高,比闭环低,调试比闭环方便, 因而得到广泛的应用。 机械运动部件 脉冲编码器同服电动机」 机械传动链 图34半闭环伺服系统的示意图 按反馈比较控制方式的不同,闭环、半闭环伺服系统又可分为以下几种: 1)数字脉冲比较伺服系统 数字脉冲比较伺服系统是将数控装置发出的数字(或脉冲)指令信号与检测装置测得 的以数字(或脉冲)形式表示的反馈信号直接进行比较,获得位置误差,实现控制。数字 脉冲比较同服系统结构简单,容易实现,工作稳定,在一般数控伺服系统中应用十分普 兰州交通大学机电工程学院数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 5 (2) 闭环、半闭环控制系统 闭环伺服系统的结构如图 3–3 所示,它带有直线位置检测装置,可直接对工作台(或 溜板)的实际位移量进行检测,加工过程中,将速度反馈信号送到速度控制电路,将工 作台(或溜板)实际位移量反馈给位置比较电路,与数控装置发出的位移指令值进行比 较,用比较后的误差信号作为控制量去控制工作台(或溜板)的运动,直到误差等于零 为止。常用的伺服驱动元件为直流或交流伺服电动机。闭环控制可以消除包括工作台(或 溜板)传动链在内的传动误差,因而定位精度高、调节速度快。但由于机床工作台(或 溜板)惯量大,对系统的稳定性会带来不利影响,使系统的调试、维修困难,且控制系 统复杂成本高,故一般应用在高精度数控机床上。 图 3–3 闭环伺服系统的示意图 半闭环伺服系统的结构如图 3–4 所示,它与闭环控制系统的区别在于检测反馈信号 不是来自安装在工作台(或溜板)上的直线位移测量元件,而是来自安装在电机轴端或 丝杠上的角位移测量元件。半闭环伺服系统通过测量电机转角或丝杆转角推算出工作台 的位移量,并将此值与指令值进行比较,用差值来进行控制。从图 3–4 中可以看出,由 于工作台未包括在控制回路中,因而称半闭环控制。这种控制方式排除了惯量很大的机 床工作台部分,使整个系统的稳定性得以保证,目前已普遍将角位移检测元件与伺服电 机做成一个部件,使系统结构简单、调试和维护也易于掌握。半闭环控制数控机床的性 能介于开环和闭环控制数控机床之间,即精度比开环高,比闭环低,调试比闭环方便, 因而得到广泛的应用。 图 3–4 半闭环伺服系统的示意图 按反馈比较控制方式的不同,闭环、半闭环伺服系统又可分为以下几种: 1) 数字脉冲比较伺服系统 数字脉冲比较伺服系统是将数控装置发出的数字(或脉冲)指令信号与检测装置测得 的以数字(或脉冲)形式表示的反馈信号直接进行比较,获得位置误差,实现控制。数字 脉冲比较伺服系统结构简单,容易实现,工作稳定,在一般数控伺服系统中应用十分普