正在加载图片...
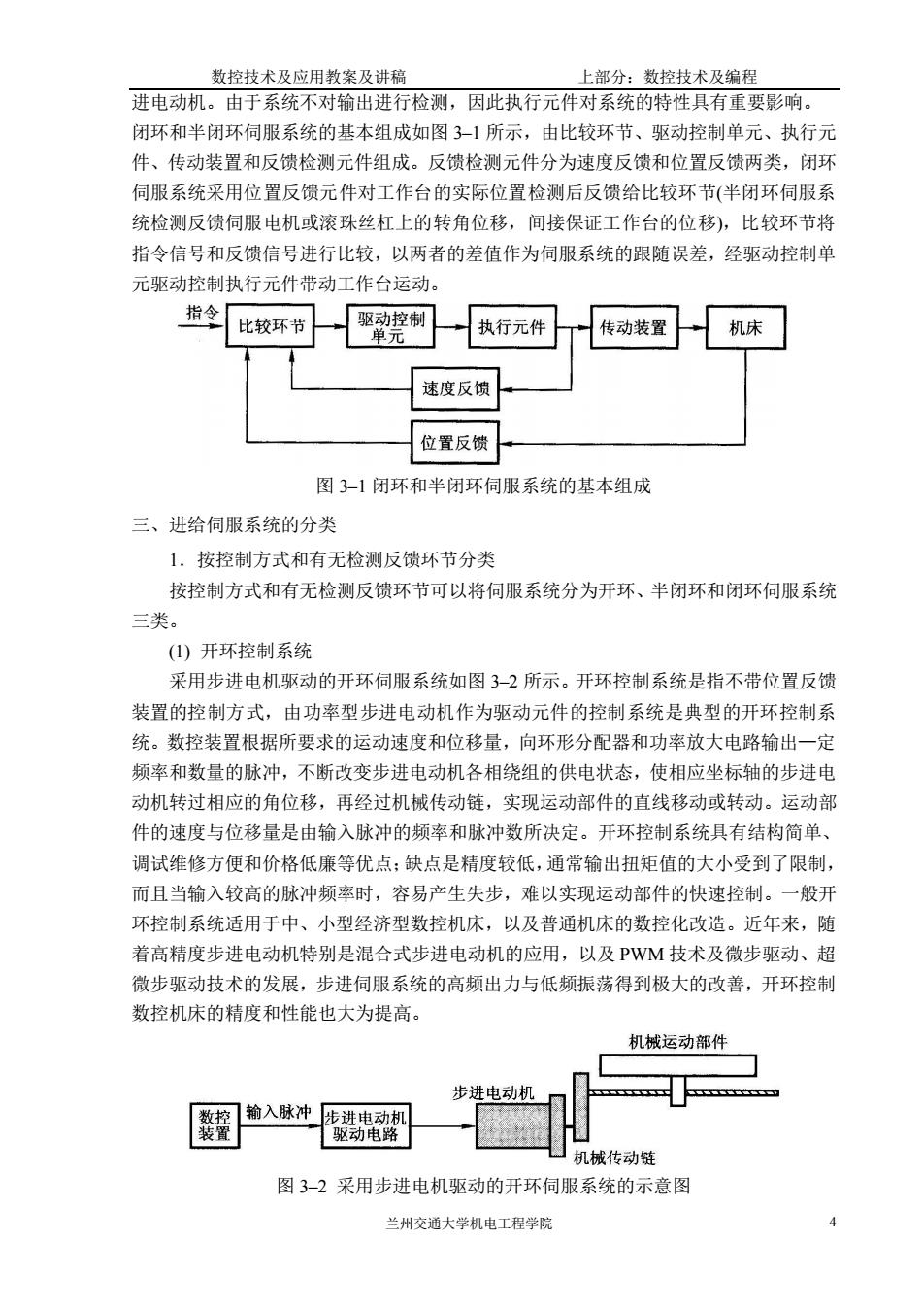
数控技术及应用教案及讲稿 上部分:数控技术及编程 进电动机。由于系统不对输出进行检测,因此执行元件对系统的特性具有重要影响。 闭环和半闭环伺服系统的基本组成如图31所示,由比较环节、驱动控制单元、执行元 件、传动装置和反馈检测元件组成。反馈检测元件分为速度反馈和位置反馈两类,闭环 伺服系统采用位置反馈元件对工作台的实际位置检测后反馈给比较环节(半闭环伺服系 统检测反馈同服电机或滚珠丝杠上的转角位移,间接保证工作台的位移),比较环节将 指令信号和反馈信号进行比较,以两者的差值作为伺服系统的跟随误差,经驱动控制单 元驱动控制执行元件带动工作台运动。 指令 比较环节 照整制 执行元件 传动装置 机床 速度反馈 位置反馈 图1闭环和半闭环伺服系统的基本组成 三、进给伺服系统的分类 1.按控制方式和有无检测反馈环节分类 按控制方式和有无检测反馈环节可以将伺服系统分为开环、半闭环和闭环伺服系统 三类。 ()开环控制系统 采用步进电机驱动的开环伺服系统如图3-2所示。开环控制系统是指不带位置反馈 装置的控制方式,由功率型步进电动机作为驱动元件的控制系统是典型的开环控制系 统。数控装置根据所要求的运动速度和位移量,向环形分配器和功率放大电路输出一定 频率和数量的脉冲,不断改变步进电动机各相绕组的供电状态,使相应坐标轴的步进电 动机转过相应的角位移,再经过机械传动链,实现运动部件的直线移动或转动。运动部 件的速度与位移量是由输入脉神的须率和脉神数所决定。开环控制系统具有结构简单、 调试维修方便和价格低廉等优点:缺点是精度较低,通常输出扭矩值的大小受到了限制, 而且当输入较高的脉冲频率时,容易产生失步,难以实现运动部件的快速控制。一般开 环控制系统适用于中、小型经济型数控机床,以及普通机床的数控化改造。近年来,随 着高精度步进电动机特别是混合式步进电动机的应用,以及PWM技术及微步驱动、超 微步驱动技术的发展,步进伺服系统的高频出力与低频振荡得到极大的改善,开环控制 数控机床的精度和性能也大为提高。 机械运动部件 步进电动机 机械传动链 图3-2采用步进电机驱动的开环伺服系统的示意图 兰州交通大学机电工程学院 数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 4 进电动机。由于系统不对输出进行检测,因此执行元件对系统的特性具有重要影响。 闭环和半闭环伺服系统的基本组成如图 3–1 所示,由比较环节、驱动控制单元、执行元 件、传动装置和反馈检测元件组成。反馈检测元件分为速度反馈和位置反馈两类,闭环 伺服系统采用位置反馈元件对工作台的实际位置检测后反馈给比较环节(半闭环伺服系 统检测反馈伺服电机或滚珠丝杠上的转角位移,间接保证工作台的位移),比较环节将 指令信号和反馈信号进行比较,以两者的差值作为伺服系统的跟随误差,经驱动控制单 元驱动控制执行元件带动工作台运动。 图 3–1 闭环和半闭环伺服系统的基本组成 三、进给伺服系统的分类 1.按控制方式和有无检测反馈环节分类 按控制方式和有无检测反馈环节可以将伺服系统分为开环、半闭环和闭环伺服系统 三类。 (1) 开环控制系统 采用步进电机驱动的开环伺服系统如图 3–2 所示。开环控制系统是指不带位置反馈 装置的控制方式,由功率型步进电动机作为驱动元件的控制系统是典型的开环控制系 统。数控装置根据所要求的运动速度和位移量,向环形分配器和功率放大电路输出—定 频率和数量的脉冲,不断改变步进电动机各相绕组的供电状态,使相应坐标轴的步进电 动机转过相应的角位移,再经过机械传动链,实现运动部件的直线移动或转动。运动部 件的速度与位移量是由输入脉冲的频率和脉冲数所决定。开环控制系统具有结构简单、 调试维修方便和价格低廉等优点;缺点是精度较低,通常输出扭矩值的大小受到了限制, 而且当输入较高的脉冲频率时,容易产生失步,难以实现运动部件的快速控制。一般开 环控制系统适用于中、小型经济型数控机床,以及普通机床的数控化改造。近年来,随 着高精度步进电动机特别是混合式步进电动机的应用,以及 PWM 技术及微步驱动、超 微步驱动技术的发展,步进伺服系统的高频出力与低频振荡得到极大的改善,开环控制 数控机床的精度和性能也大为提高。 图 3–2 采用步进电机驱动的开环伺服系统的示意图