正在加载图片...
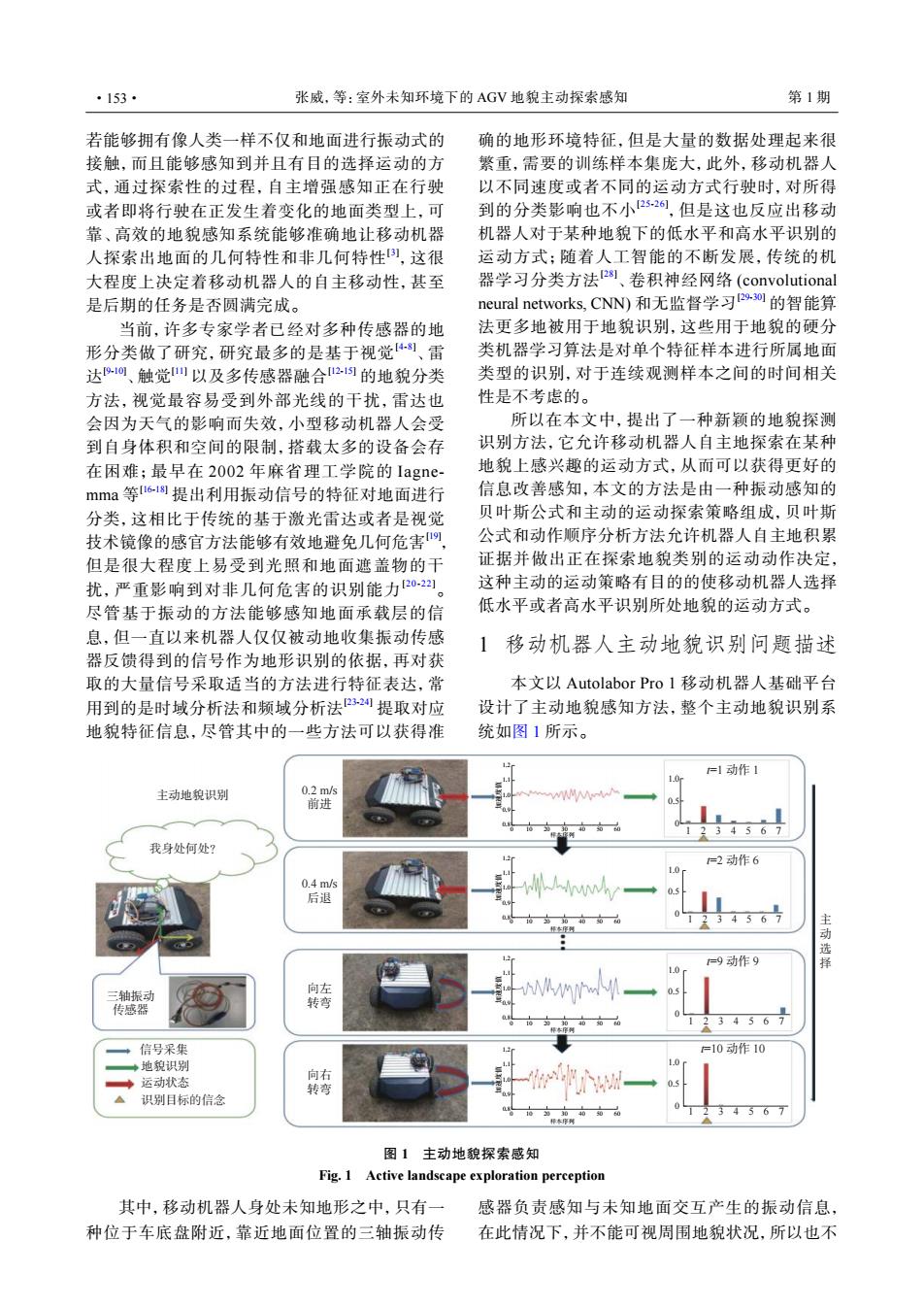
·153· 张威,等:室外未知环境下的AGV地貌主动探索感知 第1期 若能够拥有像人类一样不仅和地面进行振动式的 确的地形环境特征,但是大量的数据处理起来很 接触,而且能够感知到并且有目的选择运动的方 繁重,需要的训练样本集庞大,此外,移动机器人 式,通过探索性的过程,自主增强感知正在行驶 以不同速度或者不同的运动方式行驶时,对所得 或者即将行驶在正发生着变化的地面类型上,可 到的分类影响也不小22,但是这也反应出移动 靠、高效的地貌感知系统能够准确地让移动机器 机器人对于某种地貌下的低水平和高水平识别的 人探索出地面的几何特性和非几何特性),这很 运动方式:随着人工智能的不断发展,传统的机 大程度上决定着移动机器人的自主移动性,甚至 器学习分类方法28,、卷积神经网络(convolutional 是后期的任务是否圆满完成。 neural networks,CNN)和无监督学习s0的智能算 当前,许多专家学者已经对多种传感器的地 法更多地被用于地貌识别,这些用于地貌的硬分 形分类做了研究,研究最多的是基于视觉41、雷 类机器学习算法是对单个特征样本进行所属地面 达0、触觉山以及多传感器融合2的地貌分类 类型的识别,对于连续观测样本之间的时间相关 方法,视觉最容易受到外部光线的干扰,雷达也 性是不考虑的。 会因为天气的影响而失效,小型移动机器人会受 所以在本文中,提出了一种新颖的地貌探测 到自身体积和空间的限制,搭载太多的设备会存 识别方法,它允许移动机器人自主地探索在某种 在困难;最早在2002年麻省理工学院的lagne- 地貌上感兴趣的运动方式,从而可以获得更好的 mma等61提出利用振动信号的特征对地面进行 信息改善感知,本文的方法是由一种振动感知的 分类,这相比于传统的基于激光雷达或者是视觉 贝叶斯公式和主动的运动探索策略组成,贝叶斯 技术镜像的感官方法能够有效地避免几何危害四, 公式和动作顺序分析方法允许机器人自主地积累 但是很大程度上易受到光照和地面遮盖物的干 证据并做出正在探索地貌类别的运动动作决定, 扰,严重影响到对非几何危害的识别能力20-22。 这种主动的运动策略有目的的使移动机器人选择 尽管基于振动的方法能够感知地面承载层的信 低水平或者高水平识别所处地貌的运动方式。 息,但一直以来机器人仅仅被动地收集振动传感 1移动机器人主动地貌识别问题描述 器反馈得到的信号作为地形识别的依据,再对获 取的大量信号采取适当的方法进行特征表达,常 本文以Autolabor Pro1移动机器人基础平台 用到的是时域分析法和频域分析法32刈提取对应 设计了主动地貌感知方法,整个主动地貌识别系 地貌特征信息,尽管其中的一些方法可以获得准 统如图1所示。 =1动作1 主动地貌识别 0.2m/s 前进 我身处何处? =2动作6 1.0 0.4m/s 后退 0.5 23456 动 =9动作9 择 三轴振动 向 0. 传感器 转弯 34567 ◆信号采集 仁10动作10 ◆地貌识别 ◆运动状态 喜 识别目标的信念 56 图1主动地貌探索感知 Fig.1 Active landscape exploration perception 其中,移动机器人身处未知地形之中,只有一 感器负责感知与未知地面交互产生的振动信息, 种位于车底盘附近,靠近地面位置的三轴振动传 在此情况下,并不能可视周围地貌状况,所以也不若能够拥有像人类一样不仅和地面进行振动式的 接触,而且能够感知到并且有目的选择运动的方 式,通过探索性的过程,自主增强感知正在行驶 或者即将行驶在正发生着变化的地面类型上,可 靠、高效的地貌感知系统能够准确地让移动机器 人探索出地面的几何特性和非几何特性[3] ,这很 大程度上决定着移动机器人的自主移动性,甚至 是后期的任务是否圆满完成。 当前,许多专家学者已经对多种传感器的地 形分类做了研究,研究最多的是基于视觉[4-8] 、雷 达 [9-10] 、触觉[11] 以及多传感器融合[12-15] 的地貌分类 方法,视觉最容易受到外部光线的干扰,雷达也 会因为天气的影响而失效,小型移动机器人会受 到自身体积和空间的限制,搭载太多的设备会存 在困难;最早在 2002 年麻省理工学院的 Iagnemma 等 [16-18] 提出利用振动信号的特征对地面进行 分类,这相比于传统的基于激光雷达或者是视觉 技术镜像的感官方法能够有效地避免几何危害[19] , 但是很大程度上易受到光照和地面遮盖物的干 扰,严重影响到对非几何危害的识别能力[20-22]。 尽管基于振动的方法能够感知地面承载层的信 息,但一直以来机器人仅仅被动地收集振动传感 器反馈得到的信号作为地形识别的依据,再对获 取的大量信号采取适当的方法进行特征表达,常 用到的是时域分析法和频域分析法[23-24] 提取对应 地貌特征信息,尽管其中的一些方法可以获得准 确的地形环境特征,但是大量的数据处理起来很 繁重,需要的训练样本集庞大,此外,移动机器人 以不同速度或者不同的运动方式行驶时,对所得 到的分类影响也不小[25-26] ,但是这也反应出移动 机器人对于某种地貌下的低水平和高水平识别的 运动方式;随着人工智能的不断发展,传统的机 器学习分类方法[28] 、卷积神经网络 (convolutional neural networks, CNN) 和无监督学习[29-30] 的智能算 法更多地被用于地貌识别,这些用于地貌的硬分 类机器学习算法是对单个特征样本进行所属地面 类型的识别,对于连续观测样本之间的时间相关 性是不考虑的。 所以在本文中,提出了一种新颖的地貌探测 识别方法,它允许移动机器人自主地探索在某种 地貌上感兴趣的运动方式,从而可以获得更好的 信息改善感知,本文的方法是由一种振动感知的 贝叶斯公式和主动的运动探索策略组成,贝叶斯 公式和动作顺序分析方法允许机器人自主地积累 证据并做出正在探索地貌类别的运动动作决定, 这种主动的运动策略有目的的使移动机器人选择 低水平或者高水平识别所处地貌的运动方式。 1 移动机器人主动地貌识别问题描述 本文以 Autolabor Pro 1 移动机器人基础平台 设计了主动地貌感知方法,整个主动地貌识别系 统如图 1 所示。 主动地貌识别 0.2 m/s 前进 0.4 m/s 后退 向左 转弯 向右 转弯 我身处何处? 三轴振动 传感器 信号采集 地貌识别 运动状态 识别目标的信念 1.2 0 10 t=1 动作 1 t=2 动作 6 t=9 动作 9 t=10 动作 10 20 30 40 50 60 0 10 20 30 40 50 60 0 10 20 30 40 50 60 0 10 20 30 40 50 60 1 2 3 4 5 6 7 1 2 3 4 5 6 7 1 2 3 4 5 6 7 1 2 3 4 5 6 7 1.1 1.0 0.9 0.8 1.2 1.1 1.0 0.9 0.8 1.2 1.1 1.0 0.9 0.8 1.2 1.1 1.0 0.9 0.8 1.0 0.5 0 1.0 0.5 0 1.0 0.5 0 1.0 0.5 0 主 动 选 择 加速度值 加速度值 加速度值 加速度值 样本序列 样本序列 样本序列 样本序列 图 1 主动地貌探索感知 Fig. 1 Active landscape exploration perception 其中,移动机器人身处未知地形之中,只有一 种位于车底盘附近,靠近地面位置的三轴振动传 感器负责感知与未知地面交互产生的振动信息, 在此情况下,并不能可视周围地貌状况,所以也不 ·153· 张威,等:室外未知环境下的 AGV 地貌主动探索感知 第 1 期