正在加载图片...
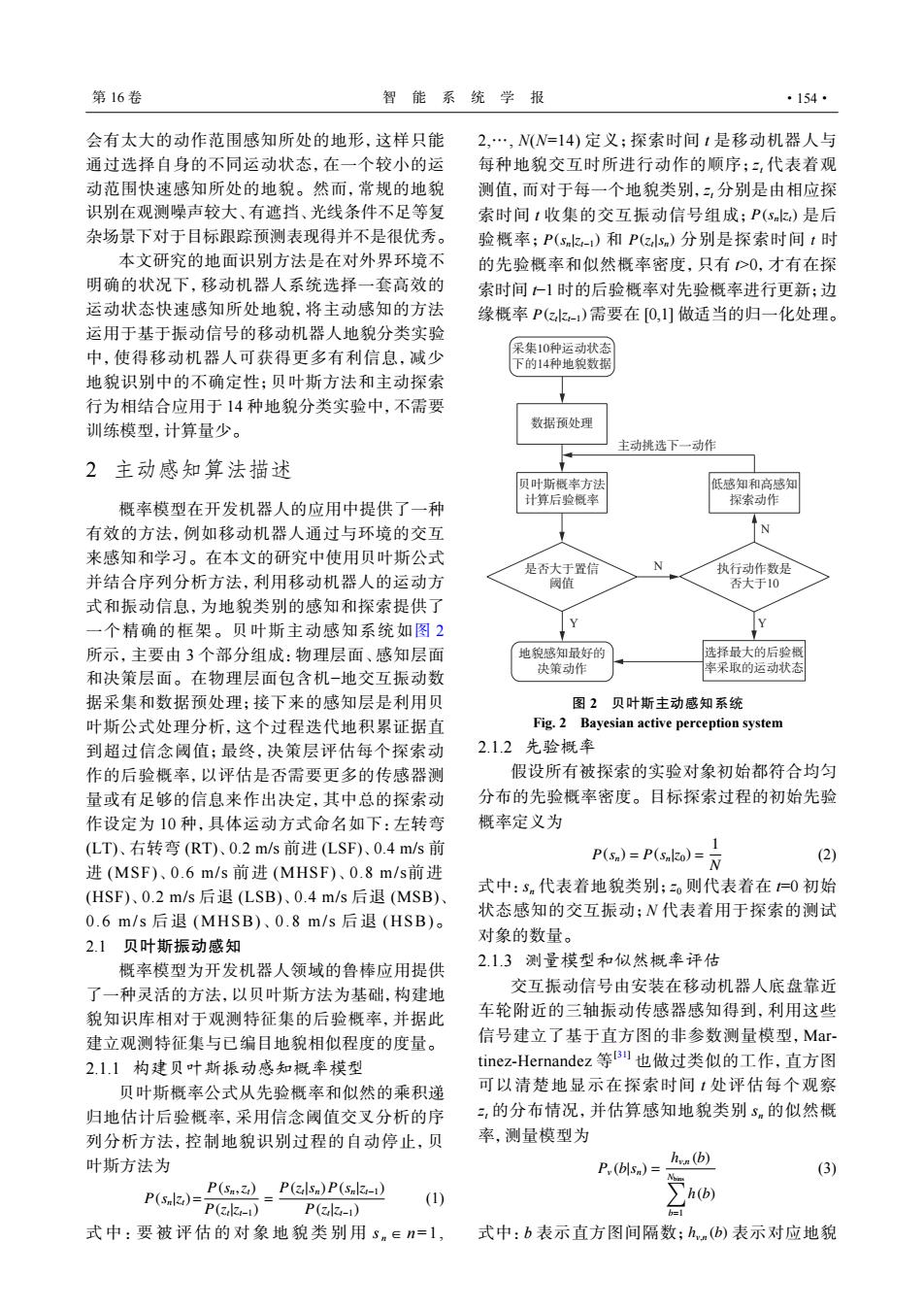
第16卷 智能系统学报 ·154· 会有太大的动作范围感知所处的地形,这样只能 2,…,N(W=14)定义;探索时间1是移动机器人与 通过选择自身的不同运动状态,在一个较小的运 每种地貌交互时所进行动作的顺序;二,代表着观 动范围快速感知所处的地貌。然而,常规的地貌 测值,而对于每一个地貌类别,,分别是由相应探 识别在观测噪声较大、有遮挡、光线条件不足等复 索时间1收集的交互振动信号组成;P(sl)是后 杂场景下对于目标跟踪预测表现得并不是很优秀。 验概率;P(snk-)和P(zsn)分别是探索时间t时 本文研究的地面识别方法是在对外界环境不 的先验概率和似然概率密度,只有>0,才有在探 明确的状况下,移动机器人系统选择一套高效的 索时间仁1时的后验概率对先验概率进行更新:边 运动状态快速感知所处地貌,将主动感知的方法 缘概率P(z-)需要在0,1]做适当的归一化处理。 运用于基于振动信号的移动机器人地貌分类实验 采集10种运动状态 中,使得移动机器人可获得更多有利信息,减少 下的14种地貌数据 地貌识别中的不确定性;贝叶斯方法和主动探索 行为相结合应用于14种地貌分类实验中,不需要 训练模型,计算量少。 数据预处理 主动挑选下一动作 2主动感知算法描述 贝叶斯概率方法 低感知和高感知 概率模型在开发机器人的应用中提供了一种 计算后验概率 探索动作 有效的方法,例如移动机器人通过与环境的交互 N 来感知和学习。在本文的研究中使用贝叶斯公式 是否大于置信 N 执行动作数是 并结合序列分析方法,利用移动机器人的运动方 网值 否大于10 式和振动信息,为地貌类别的感知和探索提供了 一个精确的框架。贝叶斯主动感知系统如图2 Y 所示,主要由3个部分组成:物理层面、感知层面 地貌感知最好的 选择最大的后验概 和决策层面。在物理层面包含机-地交互振动数 决策动作 率采取的运动状态 据采集和数据预处理;接下来的感知层是利用贝 图2贝叶斯主动感知系统 叶斯公式处理分析,这个过程迭代地积累证据直 Fig.2 Bayesian active perception system 到超过信念阈值:最终,决策层评估每个探索动 2.1.2先验概率 作的后验概率,以评估是否需要更多的传感器测 假设所有被探索的实验对象初始都符合均匀 量或有足够的信息来作出决定,其中总的探索动 分布的先验概率密度。目标探索过程的初始先验 作设定为10种,具体运动方式命名如下:左转弯 概率定义为 (LT)、右转弯(RT)、0.2m/s前进(LSF)、0.4m/s前 1 P(s.)=P(sako)=N (2) 进(MSF)、0.6m/s前进(MHSF)、0.8m/s前进 (HSF)、0.2m/s后退(LSB)、0.4m/s后退(MSB)、 式中:Sn代表着地貌类别;则代表着在=0初始 0.6m/s后退(MHSB)、0.8m/s后退(HSB)。 状态感知的交互振动;W代表着用于探索的测试 2.1贝叶斯振动感知 对象的数量。 2.1.3测量模型和似然概率评估 概率模型为开发机器人领域的鲁棒应用提供 了一种灵活的方法,以贝叶斯方法为基础,构建地 交互振动信号由安装在移动机器人底盘靠近 貌知识库相对于观测特征集的后验概率,并据此 车轮附近的三轴振动传感器感知得到,利用这些 建立观测特征集与已编目地貌相似程度的度量。 信号建立了基于直方图的非参数测量模型,Mar- 2.1.1构建贝叶斯振动感知概率模型 tinez-Hernandez等Bu也做过类似的工作,直方图 贝叶斯概率公式从先验概率和似然的乘积递 可以清楚地显示在探索时间1处评估每个观察 归地估计后验概率,采用信念阈值交叉分析的序 ,的分布情况,并估算感知地貌类别s.的似然概 列分析方法,控制地貌识别过程的自动停止,贝 率,测量模型为 叶斯方法为 hen (b) P.(blsn)= (3) P(sm,)P(zls)P(sal-1) p(sb)-p(ak-) (1) ∑h6 P(zl3-1) 式中:要被评估的对象地貌类别用sm∈n=1, 式中:b表示直方图间隔数;hn(b)表示对应地貌会有太大的动作范围感知所处的地形,这样只能 通过选择自身的不同运动状态,在一个较小的运 动范围快速感知所处的地貌。然而,常规的地貌 识别在观测噪声较大、有遮挡、光线条件不足等复 杂场景下对于目标跟踪预测表现得并不是很优秀。 本文研究的地面识别方法是在对外界环境不 明确的状况下,移动机器人系统选择一套高效的 运动状态快速感知所处地貌,将主动感知的方法 运用于基于振动信号的移动机器人地貌分类实验 中,使得移动机器人可获得更多有利信息,减少 地貌识别中的不确定性;贝叶斯方法和主动探索 行为相结合应用于 14 种地貌分类实验中,不需要 训练模型,计算量少。 2 主动感知算法描述 概率模型在开发机器人的应用中提供了一种 有效的方法,例如移动机器人通过与环境的交互 来感知和学习。在本文的研究中使用贝叶斯公式 并结合序列分析方法,利用移动机器人的运动方 式和振动信息,为地貌类别的感知和探索提供了 一个精确的框架。贝叶斯主动感知系统如图 2 所示,主要由 3 个部分组成:物理层面、感知层面 和决策层面。在物理层面包含机−地交互振动数 据采集和数据预处理;接下来的感知层是利用贝 叶斯公式处理分析,这个过程迭代地积累证据直 到超过信念阈值;最终,决策层评估每个探索动 作的后验概率,以评估是否需要更多的传感器测 量或有足够的信息来作出决定,其中总的探索动 作设定为 10 种,具体运动方式命名如下:左转弯 (LT)、右转弯 (RT)、0.2 m/s 前进 (LSF)、0.4 m/s 前 进 (MSF)、0.6 m/s 前进 (MHSF)、0.8 m/s前进 (HSF)、0.2 m/s 后退 (LSB)、0.4 m/s 后退 (MSB)、 0.6 m/s 后 退 (MHSB)、 0.8 m/s 后 退 (HSB)。 2.1 贝叶斯振动感知 概率模型为开发机器人领域的鲁棒应用提供 了一种灵活的方法,以贝叶斯方法为基础,构建地 貌知识库相对于观测特征集的后验概率,并据此 建立观测特征集与已编目地貌相似程度的度量。 2.1.1 构建贝叶斯振动感知概率模型 贝叶斯概率公式从先验概率和似然的乘积递 归地估计后验概率,采用信念阈值交叉分析的序 列分析方法,控制地貌识别过程的自动停止,贝 叶斯方法为 P(sn |zt)= P(sn,zt) P(zt |zt−1) = P(zt |sn)P(sn|zt−1) P(zt |zt−1) (1) 式中:要被评估的对象地貌类别 用 s n∈n =1, P(sn|zt) P(sn|zt−1) P(zt |sn) t P(zt |zt−1) 2,…, N(N=14) 定义;探索时间 t 是移动机器人与 每种地貌交互时所进行动作的顺序;zt 代表着观 测值,而对于每一个地貌类别,zt 分别是由相应探 索时间 t 收集的交互振动信号组成; 是后 验概率; 和 分别是探索时间 时 的先验概率和似然概率密度,只有 t>0,才有在探 索时间 t−1 时的后验概率对先验概率进行更新;边 缘概率 需要在 [0,1] 做适当的归一化处理。 采集10种运动状态 下的14种地貌数据 Y Y N N 数据预处理 贝叶斯概率方法 计算后验概率 是否大于置信 阈值 地貌感知最好的 决策动作 主动挑选下一动作 低感知和高感知 探索动作 执行动作数是 否大于10 选择最大的后验概 率采取的运动状态 图 2 贝叶斯主动感知系统 Fig. 2 Bayesian active perception system 2.1.2 先验概率 假设所有被探索的实验对象初始都符合均匀 分布的先验概率密度。目标探索过程的初始先验 概率定义为 P(sn) = P(sn|z0) = 1 N (2) 式中:sn 代表着地貌类别;z0 则代表着在 t=0 初始 状态感知的交互振动;N 代表着用于探索的测试 对象的数量。 2.1.3 测量模型和似然概率评估 交互振动信号由安装在移动机器人底盘靠近 车轮附近的三轴振动传感器感知得到,利用这些 信号建立了基于直方图的非参数测量模型,Martinez-Hernandez 等 [31] 也做过类似的工作,直方图 可以清楚地显示在探索时间 t 处评估每个观察 zt 的分布情况,并估算感知地貌类别 sn 的似然概 率,测量模型为 Pv (b|sn) = hv,n (b) ∑Nbins b=1 h(b) (3) 式中:b 表示直方图间隔数; hv,n (b) 表示对应地貌 第 16 卷 智 能 系 统 学 报 ·154·