正在加载图片...
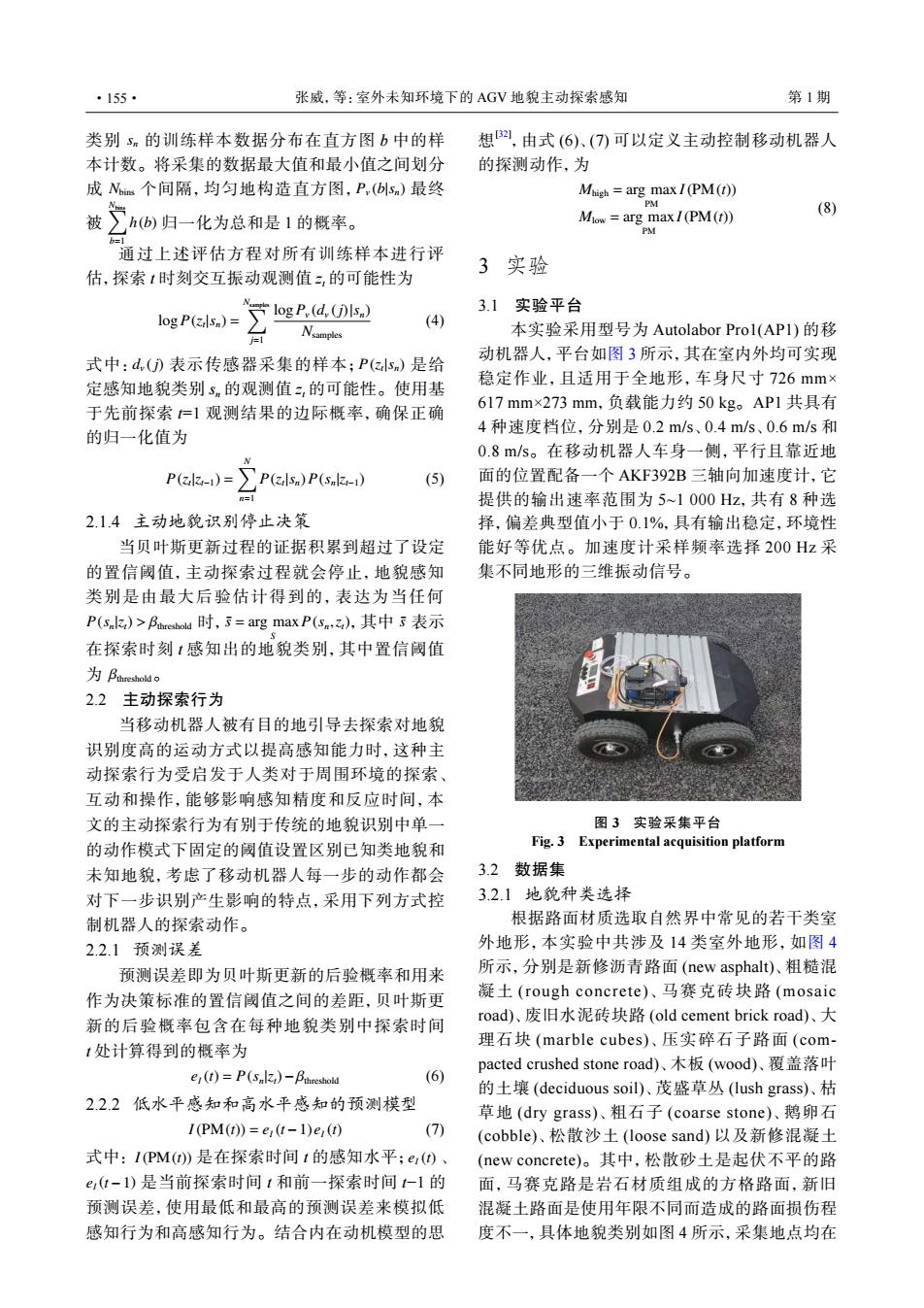
·155· 张威,等:室外未知环境下的AGV地貌主动探索感知 第1期 类别sn的训练样本数据分布在直方图b中的样 想,由式(6)、(⑦)可以定义主动控制移动机器人 本计数。将采集的数据最大值和最小值之间划分 的探测动作,为 成Ns个间隔,均匀地构造直方图,P(blsn)最终 Mhigh arg max I (PM(t)) 被方4归一化为总和是1的概率。 PM Miow arg max I(PM(t)) (8) PM =1 通过上述评估方程对所有训练样本进行评 3实验 估,探索1时刻交互振动观测值:,的可能性为 log P.(d,(j)Is) 3.1实验平台 log P(zls)= (4) 人 Nsamples 本实验采用型号为Autolabor Prol(APl)的移 式中:d()表示传感器采集的样本;P(zs)是给 动机器人,平台如图3所示,其在室内外均可实现 定感知地貌类别sn的观测值z,的可能性。使用基 稳定作业,且适用于全地形,车身尺寸726mm× 于先前探索仁1观测结果的边际概率,确保正确 617mm×273mm,负载能力约50kg。AP1共具有 的归一化值为 4种速度档位,分别是0.2m/s、0.4m/s、0.6m/s和 0.8m/s。在移动机器人车身一侧,平行且靠近地 P(l-1)= P(zs)P(sk1) (5) 面的位置配备一个AKF392B三轴向加速度计,它 n=l 提供的输出速率范围为5~1000Hz,共有8种选 2.1.4主动地貌识别停止决策 择,偏差典型值小于01%,具有输出稳定,环境性 当贝叶斯更新过程的证据积累到超过了设定 能好等优点。加速度计采样频率选择200Hz采 的置信阈值,主动探索过程就会停止,地貌感知 集不同地形的三维振动信号。 类别是由最大后验估计得到的,表达为当任何 P(snl)>Breshold时,5=arg max P(sa,),其中5表示 在探索时刻1感知出的地貌类别,其中置信阈值 为Behd 2.2主动探索行为 当移动机器人被有目的地引导去探索对地貌 识别度高的运动方式以提高感知能力时,这种主 动探索行为受启发于人类对于周围环境的探索、 互动和操作,能够影响感知精度和反应时间,本 文的主动探索行为有别于传统的地貌识别中单一 图3实验采集平台 的动作模式下固定的阈值设置区别已知类地貌和 Fig.3 Experimental acquisition platform 未知地貌,考虑了移动机器人每一步的动作都会 3.2数据集 对下一步识别产生影响的特点,采用下列方式控 3.2.1地貌种类选择 制机器人的探索动作。 根据路面材质选取自然界中常见的若干类室 2.2.1预测误差 外地形,本实验中共涉及14类室外地形,如图4 预测误差即为贝叶斯更新的后验概率和用来 所示,分别是新修沥青路面(new asphalt)、粗糙混 作为决策标准的置信阈值之间的差距,贝叶斯更 凝土(rough concrete)、马赛克砖块路(mosaic 新的后验概率包含在每种地貌类别中探索时间 road)、废旧水泥砖块路(old cement brick road)、大 1处计算得到的概率为 理石块(marble cubes)、压实碎石子路面(com- pacted crushed stone road)、木板(wood)、覆盖落叶 e1(t)=P(Salz)-Bthreshold (6) 的土壤(deciduous soil)、茂盛草丛(lush grass)、枯 2.2.2低水平感知和高水平感知的预测模型 草地(dry grass)、粗石子(coarse stone)、鹅卵石 I(PM(t))=e,(t-1)e,(t) (7) (cobble)、松散沙土(loose sand)以及新修混凝土 式中:IPM()是在探索时间1的感知水平;e()、 (new concrete)。其中,松散砂土是起伏不平的路 e,(t-1)是当前探索时间1和前一探索时间1~1的 面,马赛克路是岩石材质组成的方格路面,新旧 预测误差,使用最低和最高的预测误差来模拟低 混凝土路面是使用年限不同而造成的路面损伤程 感知行为和高感知行为。结合内在动机模型的思 度不一,具体地貌类别如图4所示,采集地点均在sn Nbins Pv (b|sn) ∑Nbins b=1 h(b) 类别 的训练样本数据分布在直方图 b 中的样 本计数。将采集的数据最大值和最小值之间划分 成 个间隔,均匀地构造直方图, 最终 被 归一化为总和是 1 的概率。 通过上述评估方程对所有训练样本进行评 估,探索 t 时刻交互振动观测值 zt 的可能性为 logP(zt |sn) = N∑samples j=1 logPv (dv (j)|sn) Nsamples (4) dv (j) P(zt 式中: 表示传感器采集的样本; |sn) 是给 定感知地貌类别 sn 的观测值 zt 的可能性。使用基 于先前探索 t=1 观测结果的边际概率,确保正确 的归一化值为 P(zt |zt−1) = ∑N n=1 P(zt |sn)P(sn|zt−1) (5) 2.1.4 主动地貌识别停止决策 P(sn|zt) > βthreshold s¯ = arg max S P(sn,zt) s¯ βthreshold 当贝叶斯更新过程的证据积累到超过了设定 的置信阈值,主动探索过程就会停止,地貌感知 类别是由最大后验估计得到的,表达为当任何 时, ,其中 表示 在探索时刻 t 感知出的地貌类别,其中置信阈值 为 。 2.2 主动探索行为 当移动机器人被有目的地引导去探索对地貌 识别度高的运动方式以提高感知能力时,这种主 动探索行为受启发于人类对于周围环境的探索、 互动和操作,能够影响感知精度和反应时间,本 文的主动探索行为有别于传统的地貌识别中单一 的动作模式下固定的阈值设置区别已知类地貌和 未知地貌,考虑了移动机器人每一步的动作都会 对下一步识别产生影响的特点,采用下列方式控 制机器人的探索动作。 2.2.1 预测误差 预测误差即为贝叶斯更新的后验概率和用来 作为决策标准的置信阈值之间的差距,贝叶斯更 新的后验概率包含在每种地貌类别中探索时间 t 处计算得到的概率为 eI (t) = P(sn|zt)−βthreshold (6) 2.2.2 低水平感知和高水平感知的预测模型 I(PM(t)) = eI (t−1) eI (t) (7) I(PM(t)) eI (t) eI (t−1) 式中: 是在探索时间 t 的感知水平; 、 是当前探索时间 t 和前一探索时间 t−1 的 预测误差,使用最低和最高的预测误差来模拟低 感知行为和高感知行为。结合内在动机模型的思 想 [32] ,由式 (6)、(7) 可以定义主动控制移动机器人 的探测动作,为 Mhigh = arg max PM I(PM(t)) Mlow = arg max PM I(PM(t)) (8) 3 实验 3.1 实验平台 本实验采用型号为 Autolabor Pro1(AP1) 的移 动机器人,平台如图 3 所示,其在室内外均可实现 稳定作业,且适用于全地形,车身尺寸 726 mm× 617 mm×273 mm,负载能力约 50 kg。AP1 共具有 4 种速度档位,分别是 0.2 m/s、0.4 m/s、0.6 m/s 和 0.8 m/s。在移动机器人车身一侧,平行且靠近地 面的位置配备一个 AKF392B 三轴向加速度计,它 提供的输出速率范围为 5~1 000 Hz,共有 8 种选 择,偏差典型值小于 0.1%,具有输出稳定,环境性 能好等优点。加速度计采样频率选择 200 Hz 采 集不同地形的三维振动信号。 图 3 实验采集平台 Fig. 3 Experimental acquisition platform 3.2 数据集 3.2.1 地貌种类选择 根据路面材质选取自然界中常见的若干类室 外地形,本实验中共涉及 14 类室外地形,如图 4 所示,分别是新修沥青路面 (new asphalt)、粗糙混 凝土 (rough concrete)、马赛克砖块路 (mosaic road)、废旧水泥砖块路 (old cement brick road)、大 理石块 (marble cubes)、压实碎石子路面 (compacted crushed stone road)、木板 (wood)、覆盖落叶 的土壤 (deciduous soil)、茂盛草丛 (lush grass)、枯 草地 (dry grass)、粗石子 (coarse stone)、鹅卵石 (cobble)、松散沙土 (loose sand) 以及新修混凝土 (new concrete)。其中,松散砂土是起伏不平的路 面,马赛克路是岩石材质组成的方格路面,新旧 混凝土路面是使用年限不同而造成的路面损伤程 度不一,具体地貌类别如图 4 所示,采集地点均在 ·155· 张威,等:室外未知环境下的 AGV 地貌主动探索感知 第 1 期