正在加载图片...
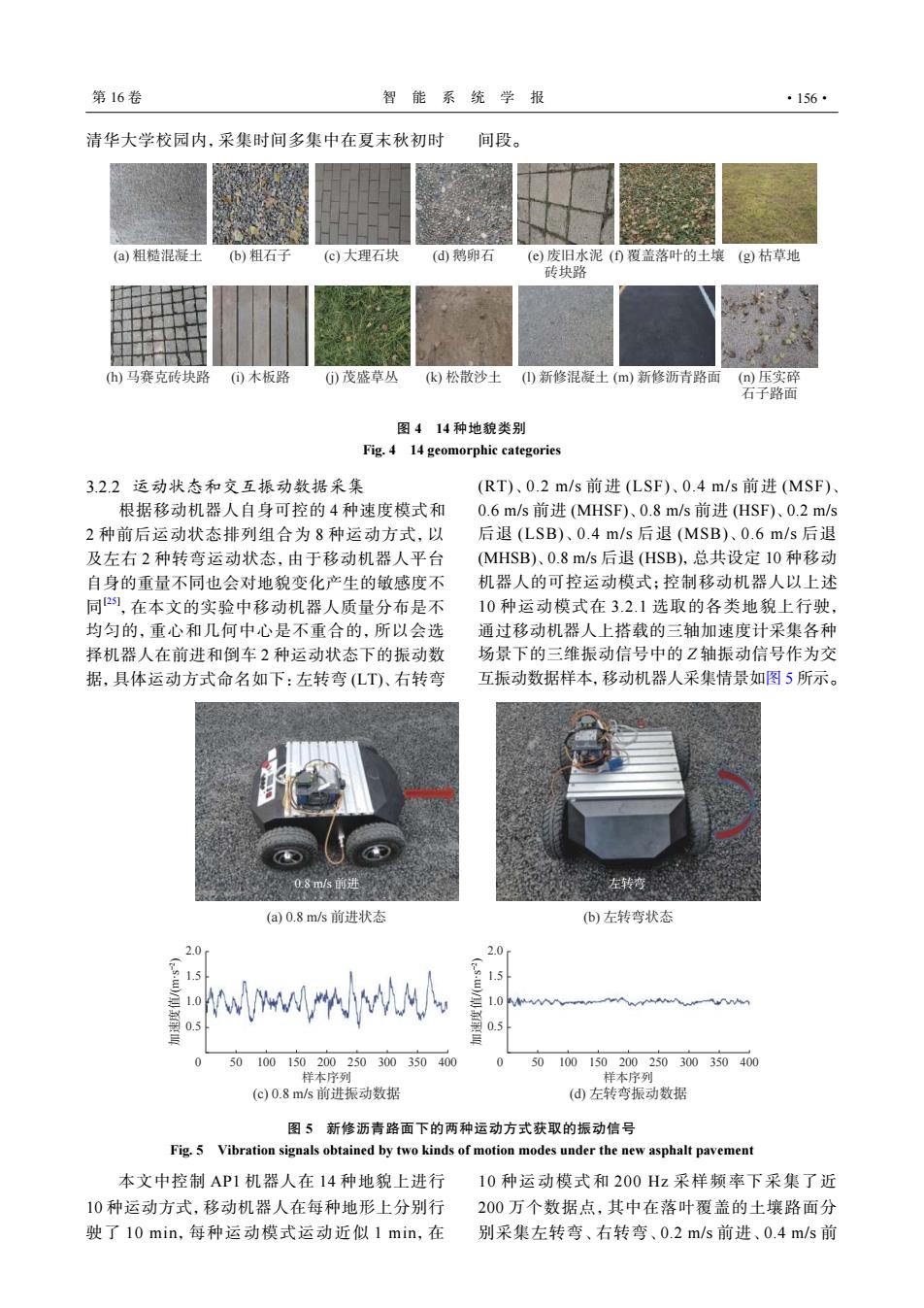
第16卷 智能系统学报 ·156· 清华大学校园内,采集时间多集中在夏末秋初时 间段。 (a)粗糙混凝土 (b)粗石子(c)大理石块(d)鹅卵石 (e)废I旧水泥()覆盖落叶的土壤(g)枯草地 砖块路 h)马赛克砖块路 (①木板路 )茂盛草丛 (k)松散沙土(新修混凝土()新修沥青路面 (n)压实碎 石子路面 图414种地貌类别 Fig.4 14 geomorphic categories 3.2.2运动状态和交互振动数据采集 (RT)、0.2m/s前进(LSF)、0.4m/s前进(MSF) 根据移动机器人自身可控的4种速度模式和 0.6m/s前进(MHSF)、0.8m/s前进(HSF)、0.2m/s 2种前后运动状态排列组合为8种运动方式,以 后退(LSB)、0.4m/s后退(MSB)、0.6m/s后退 及左右2种转弯运动状态,由于移动机器人平台 (MHSB)、0.8m/s后退(HSB),总共设定10种移动 自身的重量不同也会对地貌变化产生的敏感度不 机器人的可控运动模式;控制移动机器人以上述 同],在本文的实验中移动机器人质量分布是不 10种运动模式在3.2.1选取的各类地貌上行驶, 均匀的,重心和几何中心是不重合的,所以会选 通过移动机器人上搭载的三轴加速度计采集各种 择机器人在前进和倒车2种运动状态下的振动数 场景下的三维振动信号中的Z轴振动信号作为交 据,具体运动方式命名如下:左转弯(LT)、右转弯 互振动数据样本,移动机器人采集情景如图5所示。 20.8m/s前进 左转弯 (a)0.8m/s前进状态 (b)左转弯状态 2.0 2.0 1.5 wyA人 1.0 0.5 0.5 50 100150200250300350400 50 100150200250300350400 样本序列 样本序列 (c)0.8m/s前进振动数据 (d左转弯振动数据 图5新修沥青路面下的两种运动方式获取的振动信号 Fig.5 Vibration signals obtained by two kinds of motion modes under the new asphalt pavement 本文中控制AP1机器人在14种地貌上进行 10种运动模式和200Hz采样频率下采集了近 10种运动方式,移动机器人在每种地形上分别行 200万个数据点,其中在落叶覆盖的土壤路面分 驶了l0min,每种运动模式运动近似1min,在 别采集左转弯、右转弯、0.2m/s前进、0.4m/s前清华大学校园内,采集时间多集中在夏末秋初时 间段。 (f) 覆盖落叶的土壤 (g) 枯草地 (h) 马赛克砖块路 (i) 木板路 (j) 茂盛草丛 (k) 松散沙土 (l) 新修混凝土 (m) 新修沥青路面 (n) 压实碎 石子路面 (a) 粗糙混凝土 (b) 粗石子 (c) 大理石块 (d) 鹅卵石 (e) 废旧水泥 砖块路 图 4 14 种地貌类别 Fig. 4 14 geomorphic categories 3.2.2 运动状态和交互振动数据采集 根据移动机器人自身可控的 4 种速度模式和 2 种前后运动状态排列组合为 8 种运动方式,以 及左右 2 种转弯运动状态,由于移动机器人平台 自身的重量不同也会对地貌变化产生的敏感度不 同 [25] ,在本文的实验中移动机器人质量分布是不 均匀的,重心和几何中心是不重合的,所以会选 择机器人在前进和倒车 2 种运动状态下的振动数 据,具体运动方式命名如下:左转弯 (LT)、右转弯 (RT)、0.2 m/s 前进 (LSF)、0.4 m/s 前进 (MSF)、 0.6 m/s 前进 (MHSF)、0.8 m/s 前进 (HSF)、0.2 m/s 后退 (LSB)、0.4 m/s 后退 (MSB)、0.6 m/s 后退 (MHSB)、0.8 m/s 后退 (HSB),总共设定 10 种移动 机器人的可控运动模式;控制移动机器人以上述 10 种运动模式在 3.2.1 选取的各类地貌上行驶, 通过移动机器人上搭载的三轴加速度计采集各种 场景下的三维振动信号中的 Z 轴振动信号作为交 互振动数据样本,移动机器人采集情景如图 5 所示。 0.8 m/s 前进 左转弯 2.0 1.5 1.0 0.5 0 50 100 150 200 250 300 350 400 加速度值/(m·s−2 ) 样本序列 (c) 0.8 m/s 前进振动数据 50 100 150 200 250 300 350 400 2.0 1.5 1.0 0.5 0 加速度值/(m·s−2 ) (d) 左转弯振动数据 (a) 0.8 m/s 前进状态 (b) 左转弯状态 样本序列 图 5 新修沥青路面下的两种运动方式获取的振动信号 Fig. 5 Vibration signals obtained by two kinds of motion modes under the new asphalt pavement 本文中控制 AP1 机器人在 14 种地貌上进行 10 种运动方式,移动机器人在每种地形上分别行 驶了 10 min,每种运动模式运动近似 1 min,在 10 种运动模式和 200 Hz 采样频率下采集了近 200 万个数据点,其中在落叶覆盖的土壤路面分 别采集左转弯、右转弯、0.2 m/s 前进、0.4 m/s 前 第 16 卷 智 能 系 统 学 报 ·156·