正在加载图片...
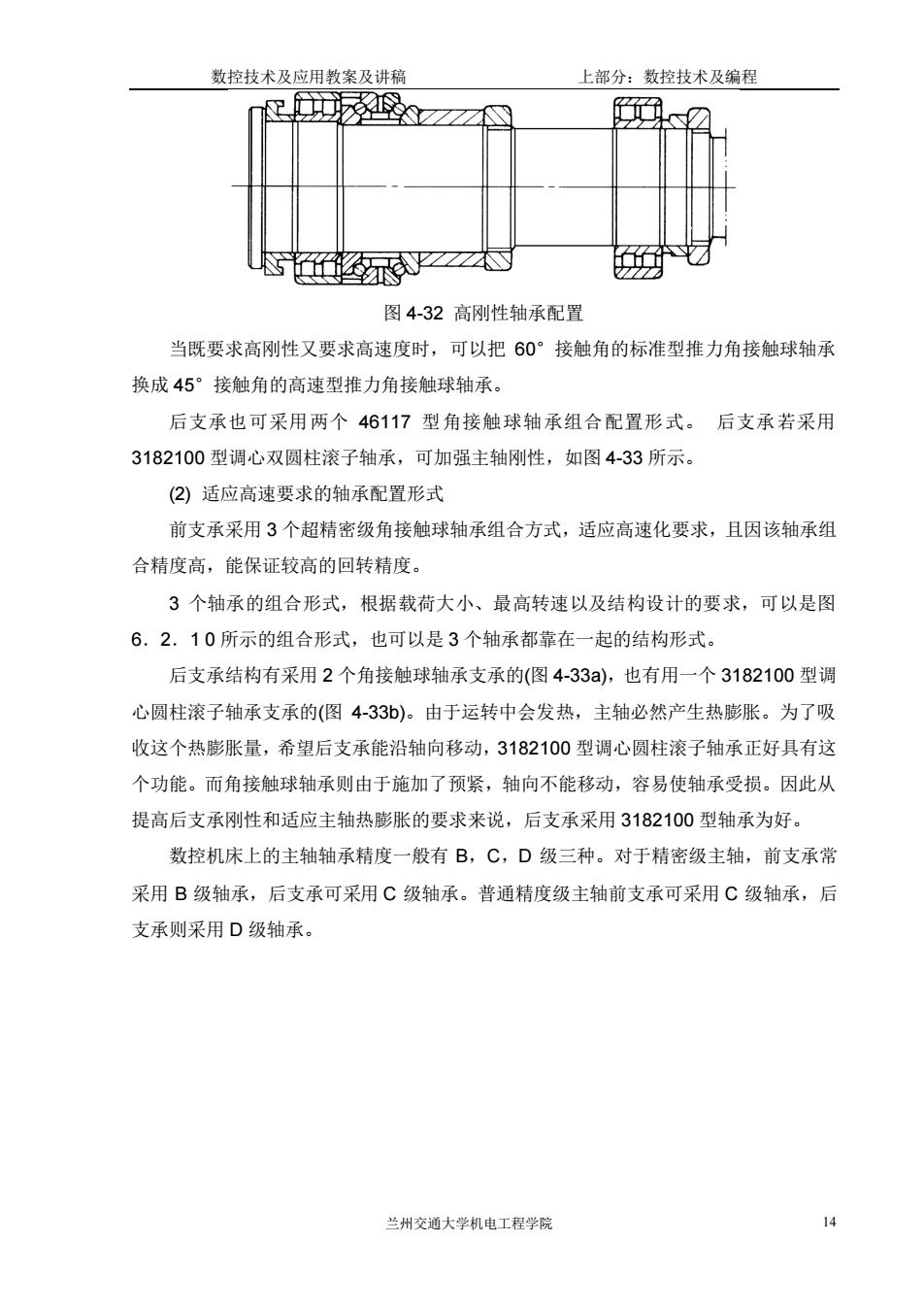
数控技术及应用教案及讲稿 上部分:数控技术及编程 捌 图4-32高刚性轴承配置 当既要求高刚性又要求高速度时,可以把60°接触角的标准型推力角接触球轴承 换成45°接触角的高速型推力角接触球轴承 后支承也可采用两个46117型角接触球轴承组合配置形式。后支承若采用 3182100型调心双圆柱滚子轴承,可加强主轴刚性,如图4-33所示。 (②)适应高速要求的轴承配置形式 前支承采用3个超精密级角接触球轴承组合方式,适应高速化要求,且因该轴承组 合精度高,能保证较高的回转精度。 3个轴承的组合形式,根据载荷大小、最高转速以及结构设计的要求,可以是图 6.2.10所示的组合形式,也可以是3个轴承都靠在一起的结构形式。 后支承结构有采用2个角接触球轴承支承的(图4-33),也有用一个3182100型调 心圆柱滚子轴承支承的(图4-336)。由于运转中会发热,主轴必然产生热膨胀。为了吸 收这个热膨胀量,希望后支承能沿轴向移动,3182100型调心圆柱滚子轴承正好具有这 个功能。而角接触球轴承则由于施加了预紧,轴向不能移动,容易使轴承受损。因此从 提高后支承刚性和适应主轴热膨胀的要求来说,后支承采用3182100型轴承为好。 数控机床上的主轴轴承精度一般有B,C,D级三种。对于精密级主轴,前支承常 采用B级轴承,后支承可采用C级轴承。普通精度级主轴前支承可采用C级轴承,后 支承则采用D级轴承。 兰州交通大学机电工程学院 数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 14 图 4-32 高刚性轴承配置 当既要求高刚性又要求高速度时,可以把 60°接触角的标准型推力角接触球轴承 换成 45°接触角的高速型推力角接触球轴承。 后支承也可采用两个 46117 型角接触球轴承组合配置形式。 后支承若采用 3182100 型调心双圆柱滚子轴承,可加强主轴刚性,如图 4-33 所示。 (2) 适应高速要求的轴承配置形式 前支承采用 3 个超精密级角接触球轴承组合方式,适应高速化要求,且因该轴承组 合精度高,能保证较高的回转精度。 3 个轴承的组合形式,根据载荷大小、最高转速以及结构设计的要求,可以是图 6.2.1 0 所示的组合形式,也可以是 3 个轴承都靠在一起的结构形式。 后支承结构有采用 2 个角接触球轴承支承的(图 4-33a),也有用一个 3182100 型调 心圆柱滚子轴承支承的(图 4-33b)。由于运转中会发热,主轴必然产生热膨胀。为了吸 收这个热膨胀量,希望后支承能沿轴向移动,3182100 型调心圆柱滚子轴承正好具有这 个功能。而角接触球轴承则由于施加了预紧,轴向不能移动,容易使轴承受损。因此从 提高后支承刚性和适应主轴热膨胀的要求来说,后支承采用 3182100 型轴承为好。 数控机床上的主轴轴承精度一般有 B,C,D 级三种。对于精密级主轴,前支承常 采用 B 级轴承,后支承可采用 C 级轴承。普通精度级主轴前支承可采用 C 级轴承,后 支承则采用 D 级轴承