正在加载图片...
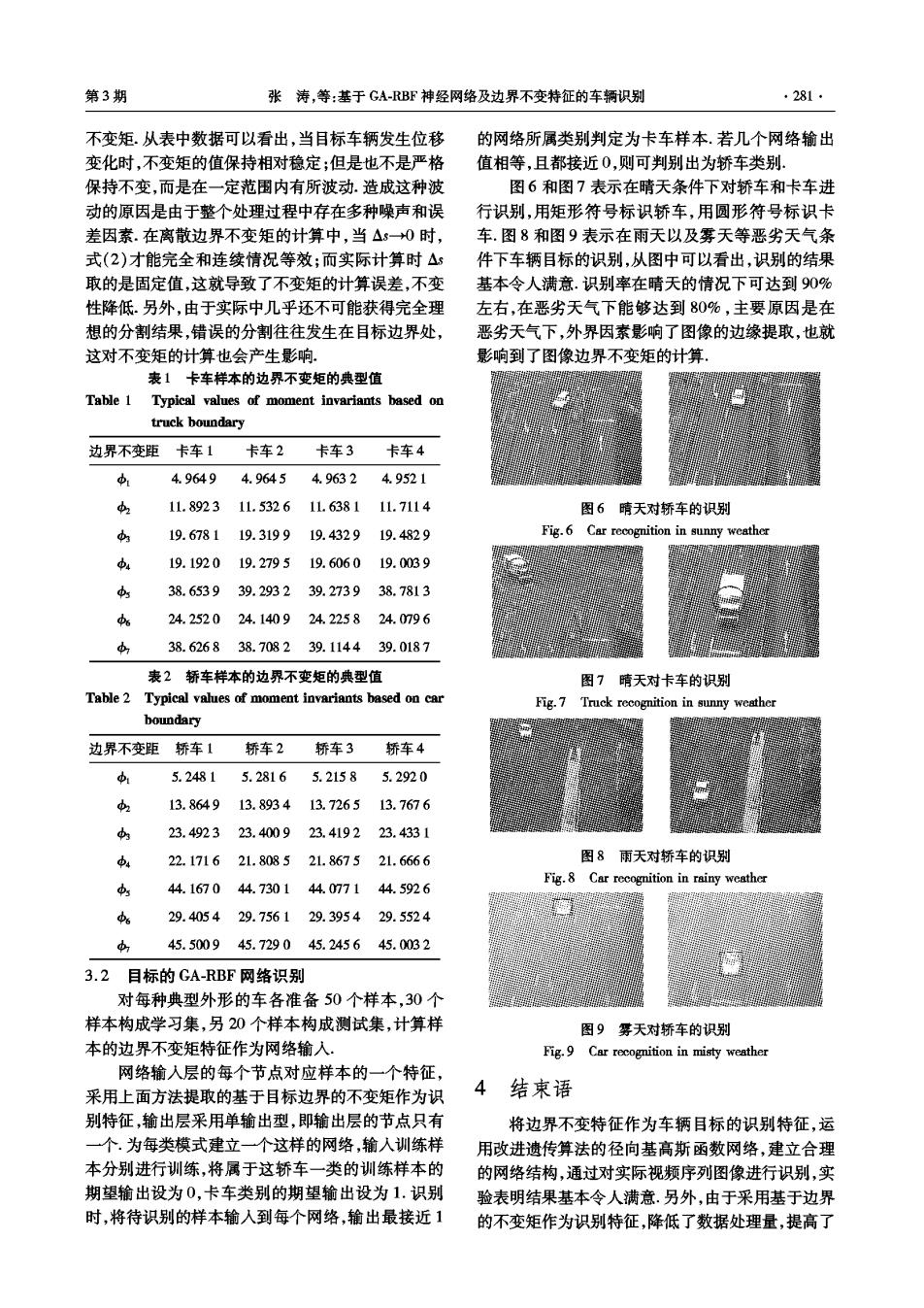
第3期 张涛,等:基于GA-RBF神经网络及边界不变持征的车辆识别 .281 不变矩.从表中数据可以看出,当目标车辆发生位移 的网络所属类别判定为卡车样本.若几个网络输出 变化时,不变矩的值保持相对稳定;但是也不是严格 值相等,且都接近0,则可判别出为轿车类别. 保持不变,而是在一定范围内有所波动.造成这种波 图6和图7表示在晴天条件下对轿车和卡车进 动的原因是由于整个处理过程中存在多种噪声和误 行识别,用矩形符号标识轿车,用圆形符号标识卡 差因素.在离散边界不变矩的计算中,当△s0时, 车.图8和图9表示在雨天以及雾天等恶劣天气条 式(2)才能完全和连续情况等效;而实际计算时△: 件下车辆目标的识别,从图中可以看出,识别的结果 取的是固定值,这就导致了不变矩的计算误差,不变 基本令人满意.识别率在晴天的情况下可达到90% 性降低.另外,由于实际中几乎还不可能获得完全理 左右,在恶劣天气下能够达到80%,主要原因是在 想的分割结果,错误的分割往往发生在目标边界处, 恶劣天气下,外界因素影响了图像的边缘提取,也就 这对不变矩的计算也会产生影响, 影响到了图像边界不变矩的计算 表1卡车样本的边界不变矩的典型值 Table 1 Typical values of moment invariants based on truck boundary 边界不变距 卡车1 卡车2 卡车3 卡车4 4.9649 4.9645 4.9632 4.9521 中 11.8923 11.5326 1L.6381 11.7114 图6晴天对轿车的识别 19.678119.3199 19.4329 19.4829 Fig.6 Car recognition in sunny weather 中4 19.192019.279519.606019.0039 真 38.6539 39.293239.273938.7813 24.252024.140924.225824.0796 华 38.6268 38.708239.114439.0187 表2轿车样本的边界不变矩的典型值 图7晴天对卡车的识别 Table 2 Typical values of moment invariants based on car Fig.7 Truck recognition in sunny weather boundary 边界不变距轿车1 轿车2 轿车3 轿车4 中1 5.2481 5.2816 5.2158 5.2920 13.8649 13.8934 13.7265 13.7676 的 23.4923 23.4009 23.4192 23.4331 4 22.1716 21.8085 21.8675 21.6666 图8雨天对轿车的识别 Fig.8 Car recognition in rainy weather 44.167044.7301 44.077144.5926 % 29.405429.756129.395429.5524 45.500945.729045.245645.0032 3.2目标的GA-RBF网络识别 对每种典型外形的车各准备50个样本,30个 样本构成学习集,另20个样本构成测试集,计算样 图9雾天对轿车的识别 本的边界不变矩特征作为网络输入。 Fig.9 Car recognition in misty weather 网络输入层的每个节点对应样本的一个特征, 采用上面方法提取的基于目标边界的不变矩作为识 4 结束语 别特征,输出层采用单输出型,即输出层的节点只有 将边界不变特征作为车辆目标的识别特征,运 一个·为每类模式建立一个这样的网络,输入训练样 用改进遗传算法的径向基高斯函数网络,建立合理 本分别进行训练,将属于这轿车一类的训练样本的 的网络结构,通过对实际视频序列图像进行识别,实 期望输出设为0,卡车类别的期望输出设为1.识别 验表明结果基本令人满意.另外,由于采用基于边界 时,将待识别的样本输入到每个网络,输出最接近1 的不变矩作为识别特征,降低了数据处理量,提高了