正在加载图片...
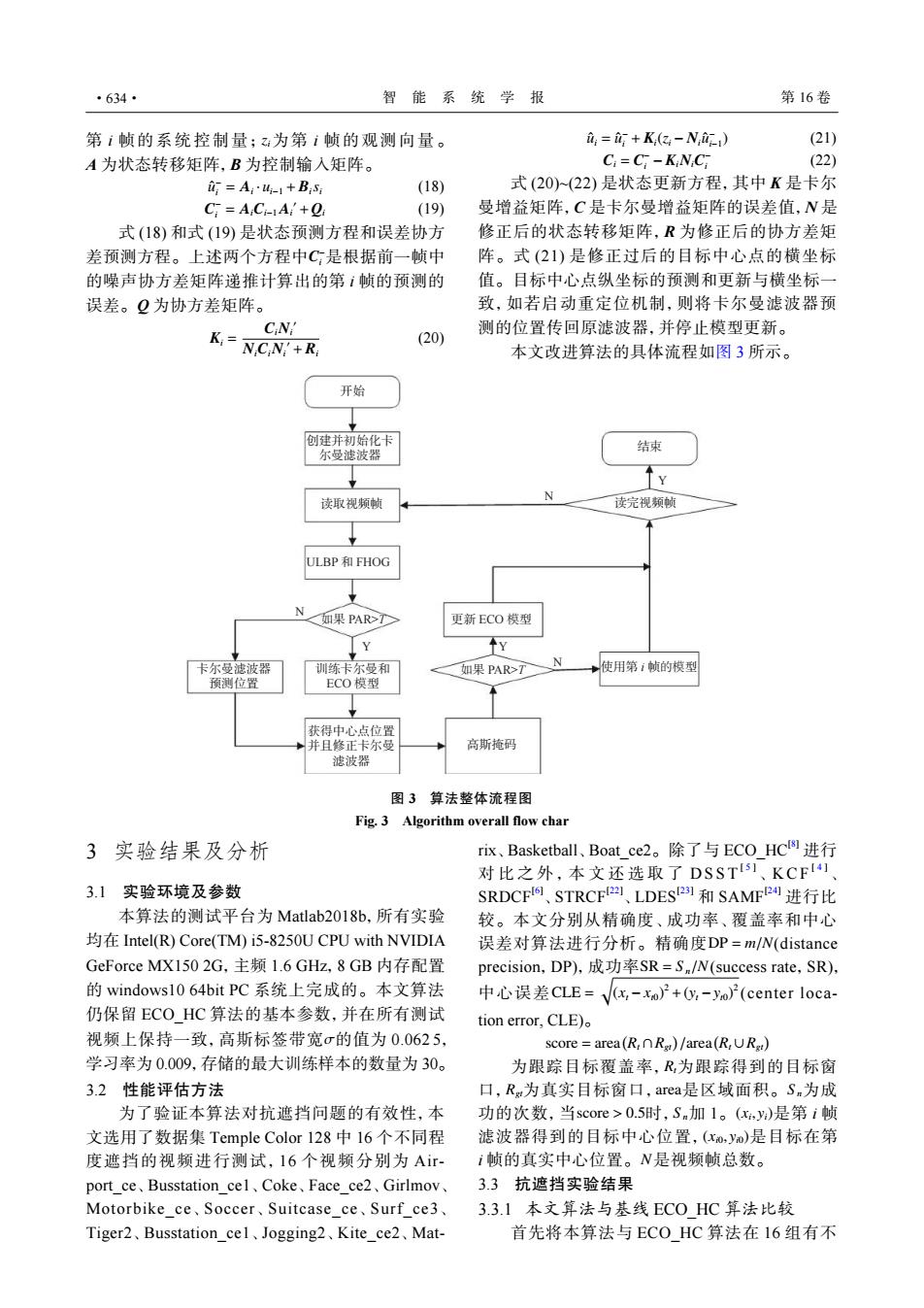
·634· 智能系统学报 第16卷 第i帧的系统控制量;z为第1帧的观测向量。 =+K (-N) (21) A为状态转移矩阵,B为控制输入矩阵。 C=C-KNC (22) i立=A-1+Bs (18) 式(20)(22)是状态更新方程,其中K是卡尔 C=A:C-1A+ (19) 曼增益矩阵,C是卡尔曼增益矩阵的误差值,N是 式(18)和式(19)是状态预测方程和误差协方 修正后的状态转移矩阵,R为修正后的协方差矩 差预测方程。上述两个方程中C是根据前一帧中 阵。式(21)是修正过后的目标中心点的横坐标 的噪声协方差矩阵递推计算出的第i帧的预测的 值。目标中心点纵坐标的预测和更新与横坐标一 误差。Q为协方差矩阵。 致,如若启动重定位机制,则将卡尔曼滤波器预 CN 测的位置传回原滤波器,并停止模型更新。 K=NCN:+R. (20) 本文改进算法的具体流程如图3所示。 开始 创建并初始化卡 结束 尔曼滤波器 读取视频帧 读完视频帧 ULBP和FHOG N如果PAR 更新ECO模型 Y 卡尔曼滤波器 训练卡尔曼和 如果PAR>T N 使用第í帧的模型 预测位置 ECO模型 获得中心点位置 并且修正卡尔曼 高斯掩码 滤波器 图3算法整体流程图 Fig.3 Algorithm overall flow char 3实验结果及分析 rix、Basketball、Boat_ce2。除了与ECO HC进行 对比之外,本文还选取了DSSTIS1、KCF] 3.1实验环境及参数 SRDCE、STRCF四、LDES1和SAMF2进行比 本算法的测试平台为Matlab2018b,所有实验 较。本文分别从精确度、成功率、覆盖率和中心 均在Intel(R)Core(TM))i5-825 OU CPU with NVIDIA 误差对算法进行分析。精确度DP=m/W(distance GeForce MX1502G,主频1.6GHz.8GB内存配置 precision,DP),成功率SR=Sn/W(success rate,SR), 的windows1064 bit PC系统上完成的。本文算法 中心误差CLE=V,-xo}+,-yoP(center loca-- 仍保留ECO HC算法的基本参数,并在所有测试 tion error,CLE) 视频上保持一致,高斯标签带宽σ的值为0.0625, score =area(R,nRa)/area(R,URa) 学习率为0.009,存储的最大训练样本的数量为30。 为跟踪目标覆盖率,R为跟踪得到的目标窗 3.2性能评估方法 口,R:为真实目标窗口,area是区域面积。Sn为成 为了验证本算法对抗遮挡问题的有效性,本 功的次数,当score>0.5时,Sn加1。(x,y)是第i帧 文选用了数据集Temple Color128中l6个不同程 滤波器得到的目标中心位置,(x00)是目标在第 度遮挡的视频进行测试,16个视频分别为Air- i帧的真实中心位置。N是视频帧总数。 port_ce、Busstation_cel、Coke、Face_ce2、Girlmov、 3.3抗遮挡实验结果 Motorbike_ce、Soccer、Suitcase_ce、Surf_ce3、 3.3.1本文算法与基线ECO HC算法比较 Tiger22、Busstation_cel、Jogging2、Kite_ce2、Mat- 首先将本算法与ECO HC算法在16组有不第 i 帧的系统控制量; zi为第 i 帧的观测向量。 A 为状态转移矩阵,B 为控制输入矩阵。 uˆ − i = Ai · ui−1 + Bisi (18) C − i = AiCi−1Ai ′ +Qi (19) C − i 式 (18) 和式 (19) 是状态预测方程和误差协方 差预测方程。上述两个方程中 是根据前一帧中 的噪声协方差矩阵递推计算出的第 i 帧的预测的 误差。Q 为协方差矩阵。 Ki = CiNi ′ NiCiNi ′ + Ri (20) uˆi = uˆ − i + Ki(zi − Niuˆ − i−1 ) (21) Ci = C − i − KiNiC − i (22) 式 (20)~(22) 是状态更新方程,其中 K 是卡尔 曼增益矩阵,C 是卡尔曼增益矩阵的误差值,N 是 修正后的状态转移矩阵,R 为修正后的协方差矩 阵。式 (21) 是修正过后的目标中心点的横坐标 值。目标中心点纵坐标的预测和更新与横坐标一 致,如若启动重定位机制,则将卡尔曼滤波器预 测的位置传回原滤波器,并停止模型更新。 本文改进算法的具体流程如图 3 所示。 开始 创建并初始化卡 尔曼滤波器 结束 Y Y Y 读取视频帧 N N N 读完视频帧 ULBP 和 FHOG 如果 PAR>T 如果 PAR>T 更新 ECO 模型 卡尔曼滤波器 预测位置 训练卡尔曼和 ECO 模型 使用第 i 帧的模型 获得中心点位置 并且修正卡尔曼 滤波器 高斯掩码 图 3 算法整体流程图 Fig. 3 Algorithm overall flow char 3 实验结果及分析 3.1 实验环境及参数 σ 本算法的测试平台为 Matlab2018b,所有实验 均在 Intel(R) Core(TM) i5-8250U CPU with NVIDIA GeForce MX150 2G,主频 1.6 GHz,8 GB 内存配置 的 windows10 64bit PC 系统上完成的。本文算法 仍保留 ECO_HC 算法的基本参数,并在所有测试 视频上保持一致,高斯标签带宽 的值为 0.062 5, 学习率为 0.009,存储的最大训练样本的数量为 30。 3.2 性能评估方法 为了验证本算法对抗遮挡问题的有效性,本 文选用了数据集 Temple Color 128 中 16 个不同程 度遮挡的视频进行测试,16 个视频分别为 Airport_ce、Busstation_ce1、Coke、Face_ce2、Girlmov、 Motorbike_ce、Soccer、Suitcase_ce、Surf_ce3、 Tiger2、Busstation_ce1、Jogging2、Kite_ce2、MatDP = m/N SR = S n/N CLE = √ (xt − xt0) 2 +(yt −yt0) 2 rix、Basketball、Boat_ce2。除了与 ECO_HC[8] 进行 对比之外,本文还选取 了 DSST [ 5 ] 、 KCF [ 4 ] 、 SRDCF[6] 、STRCF[22] 、LDES[23] 和 SAMF[24] 进行比 较。本文分别从精确度、成功率、覆盖率和中心 误差对算法进行分析。精确度 (distance precision,DP),成功率 (success rate,SR), 中心误差 (center location error, CLE)。 score = area ( Rt ∩Rgt) /area ( Rt ∪Rgt) Rt Rgt area S n score > 0.5 S n (xi , yi) (xi0, yi0) N 为跟踪目标覆盖率, 为跟踪得到的目标窗 口, 为真实目标窗口, 是区域面积。 为成 功的次数,当 时, 加 1。 是第 i 帧 滤波器得到的目标中心位置, 是目标在第 i 帧的真实中心位置。 是视频帧总数。 3.3 抗遮挡实验结果 3.3.1 本文算法与基线 ECO_HC 算法比较 首先将本算法与 ECO_HC 算法在 16 组有不 ·634· 智 能 系 统 学 报 第 16 卷