正在加载图片...
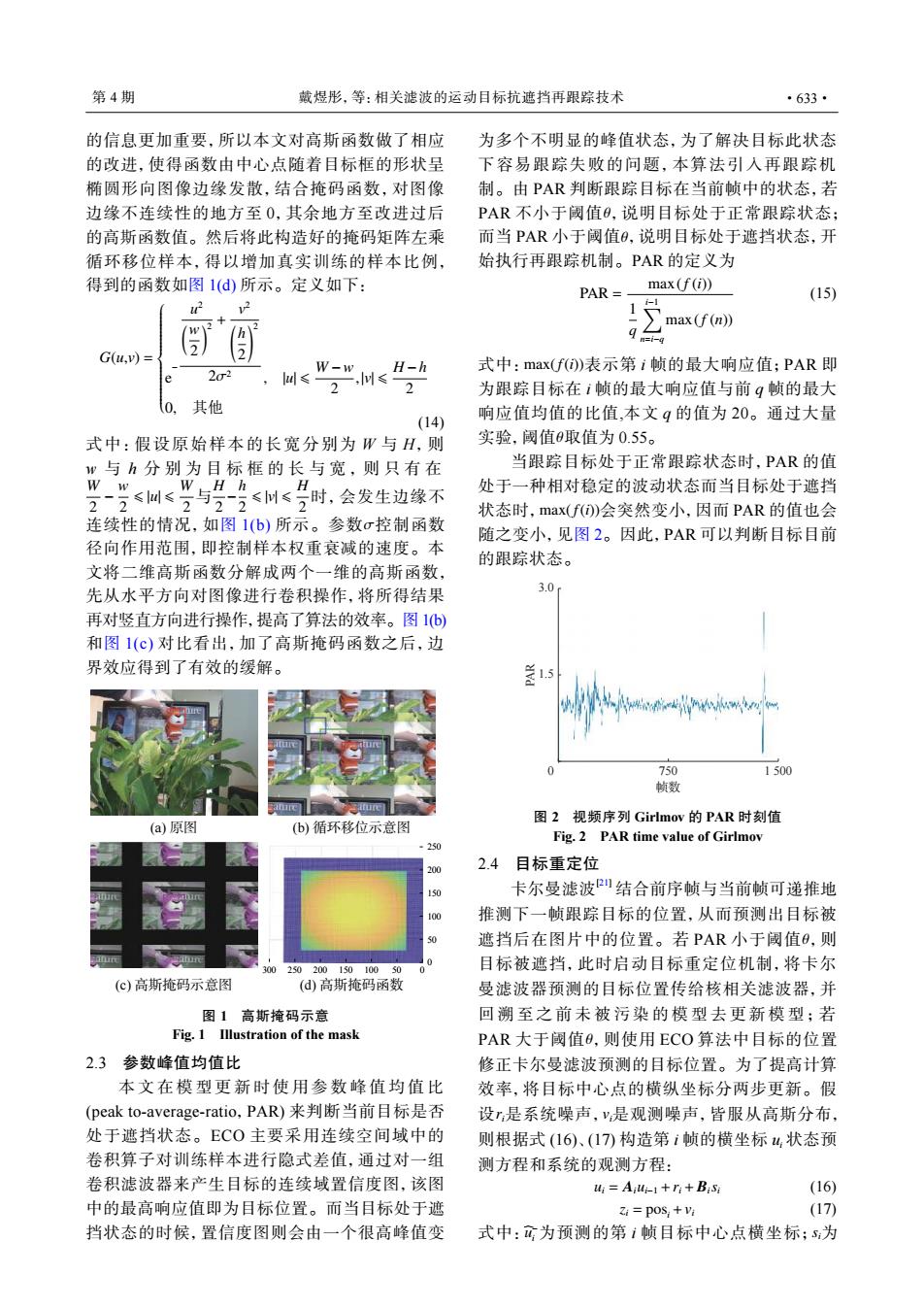
第4期 戴煜彤,等:相关滤波的运动目标抗遮挡再跟踪技术 ·633· 的信息更加重要,所以本文对高斯函数做了相应 为多个不明显的峰值状态,为了解决目标此状态 的改进,使得函数由中心点随着目标框的形状呈 下容易跟踪失败的问题,本算法引入再跟踪机 椭圆形向图像边缘发散,结合掩码函数,对图像 制。由PAR判断跟踪目标在当前帧中的状态,若 边缘不连续性的地方至0,其余地方至改进过后 PAR不小于阈值O,说明目标处于正常跟踪状态; 的高斯函数值。然后将此构造好的掩码矩阵左乘 而当PAR小于阈值0,说明目标处于遮挡状态,开 循环移位样本,得以增加真实训练的样本比例, 始执行再跟踪机制。PAR的定义为 得到的函数如图l(d)所示。定义如下: max(f(i)) PAR= (15) r2 2 i-1 1 2 max(f (n)) g tei-d G(u,v)= W-w H-h 式中:max(f)表示第i帧的最大响应值;PAR即 e 2r2 l≤ 2 为跟踪目标在1帧的最大响应值与前g帧的最大 0. 其他 响应值均值的比值,本文q的值为20。通过大量 (14) 式中:假设原始样本的长宽分别为W与H,则 实验,阈值0取值为0.55。 w与h分别为目标框的长与宽,则只有在 当跟踪目标处于正常跟踪状态时,PAR的值 :-日≤时天与-≤制号时.会发生边缘不 Ww」 H 处于一种相对稳定的波动状态而当目标处于遮挡 状态时,max(f)会突然变小,因而PAR的值也会 连续性的情况,如图1(b)所示。参数σ控制函数 随之变小,见图2。因此,PAR可以判断目标目前 径向作用范围,即控制样本权重衰减的速度。本 的跟踪状态。 文将二维高斯函数分解成两个一维的高斯函数, 先从水平方向对图像进行卷积操作,将所得结果 3.0 再对竖直方向进行操作,提高了算法的效率。图1b) 和图1(c)对比看出,加了高斯掩码函数之后,边 界效应得到了有效的缓解。 750 1500 帧数 图2视频序列Girlmov的PAR时刻值 (a)原图 (b)循环移位示意图 Fig.2 PAR time value of Girlmov -250 200 2.4目标重定位 1S0 卡尔曼滤波四结合前序帧与当前帧可递推地 100 推测下一帧跟踪目标的位置,从而预测出日标被 遮挡后在图片中的位置。若PAR小于阈值O,则 00 25020015010050 目标被遮挡,此时启动目标重定位机制,将卡尔 (c)高斯掩码示意图 (d)高斯掩码函数 曼滤波器预测的目标位置传给核相关滤波器,并 图1高斯掩码示意 回溯至之前未被污染的模型去更新模型;若 Fig.1 Illustration of the mask PAR大于阈值0,则使用ECO算法中目标的位置 2.3参数峰值均值比 修正卡尔曼滤波预测的目标位置。为了提高计算 本文在模型更新时使用参数峰值均值比 效率,将目标中心点的横纵坐标分两步更新。假 (peak to-average-ratio,.PAR)来判断当前目标是否 设是系统噪声,是观测噪声,皆服从高斯分布, 处于遮挡状态。ECO主要采用连续空间域中的 则根据式(16)、(17构造第i帧的横坐标4,状态预 卷积算子对训练样本进行隐式差值,通过对一组 测方程和系统的观测方程: 卷积滤波器来产生目标的连续域置信度图,该图 ui Aiui-1+ri+Bisi (16) 中的最高响应值即为目标位置。而当目标处于遮 Zi=pos,+Vi (17) 挡状态的时候,置信度图则会由一个很高峰值变 式中:为预测的第i帧目标中心点横坐标;s为的信息更加重要,所以本文对高斯函数做了相应 的改进,使得函数由中心点随着目标框的形状呈 椭圆形向图像边缘发散,结合掩码函数,对图像 边缘不连续性的地方至 0,其余地方至改进过后 的高斯函数值。然后将此构造好的掩码矩阵左乘 循环移位样本,得以增加真实训练的样本比例, 得到的函数如图 1(d) 所示。定义如下: G(u,v) = e − u 2 (w 2 )2 + v 2 ( h 2 )2 2σ2 , |u| ⩽ W −w 2 ,|v| ⩽ H −h 2 0, 其他 (14) W 2 − w 2 ⩽ |u| ⩽ W 2 H 2 − h 2 ⩽ |v| ⩽ H 2 σ 式中:假设原始样本的长宽分别为 W 与 H,则 w 与 h 分别为目标框的长与宽,则只有在 与 时,会发生边缘不 连续性的情况,如图 1(b) 所示。参数 控制函数 径向作用范围,即控制样本权重衰减的速度。本 文将二维高斯函数分解成两个一维的高斯函数, 先从水平方向对图像进行卷积操作,将所得结果 再对竖直方向进行操作,提高了算法的效率。图 1(b) 和图 1(c) 对比看出,加了高斯掩码函数之后,边 界效应得到了有效的缓解。 250 200 150 100 50 0 300 250 200 150 100 50 0 (a) 原图 (b) 循环移位示意图 (c) 高斯掩码示意图 (d) 高斯掩码函数 图 1 高斯掩码示意 Fig. 1 Illustration of the mask 2.3 参数峰值均值比 本文在模型更新时使用参数峰值均值 比 (peak to-average-ratio,PAR) 来判断当前目标是否 处于遮挡状态。ECO 主要采用连续空间域中的 卷积算子对训练样本进行隐式差值,通过对一组 卷积滤波器来产生目标的连续域置信度图,该图 中的最高响应值即为目标位置。而当目标处于遮 挡状态的时候,置信度图则会由一个很高峰值变 θ θ 为多个不明显的峰值状态,为了解决目标此状态 下容易跟踪失败的问题,本算法引入再跟踪机 制。由 PAR 判断跟踪目标在当前帧中的状态,若 PAR 不小于阈值 ,说明目标处于正常跟踪状态; 而当 PAR 小于阈值 ,说明目标处于遮挡状态,开 始执行再跟踪机制。PAR 的定义为 PAR = max(f (i)) 1 q ∑i−1 n=i−q max(f (n)) (15) max(f(i)) θ 式中: 表示第 i 帧的最大响应值;PAR 即 为跟踪目标在 i 帧的最大响应值与前 q 帧的最大 响应值均值的比值,本文 q 的值为 20。通过大量 实验,阈值 取值为 0.55。 max(f(i)) 当跟踪目标处于正常跟踪状态时,PAR 的值 处于一种相对稳定的波动状态而当目标处于遮挡 状态时, 会突然变小,因而 PAR 的值也会 随之变小,见图 2。因此,PAR 可以判断目标目前 的跟踪状态。 3.0 750 1 500 PAR 帧数 1.5 0 图 2 视频序列 Girlmov 的 PAR 时刻值 Fig. 2 PAR time value of Girlmov 2.4 目标重定位 θ θ ri vi 卡尔曼滤波[21] 结合前序帧与当前帧可递推地 推测下一帧跟踪目标的位置,从而预测出目标被 遮挡后在图片中的位置。若 PAR 小于阈值 ,则 目标被遮挡,此时启动目标重定位机制,将卡尔 曼滤波器预测的目标位置传给核相关滤波器,并 回溯至之前未被污染的模型去更新模型; 若 PAR 大于阈值 ,则使用 ECO 算法中目标的位置 修正卡尔曼滤波预测的目标位置。为了提高计算 效率,将目标中心点的横纵坐标分两步更新。假 设 是系统噪声, 是观测噪声,皆服从高斯分布, 则根据式 (16)、(17) 构造第 i 帧的横坐标 ui 状态预 测方程和系统的观测方程: ui = Aiui−1 +ri + Bisi (16) zi = posi +vi (17) bu − i 式中: 为预测的第 i 帧目标中心点横坐标; si为 第 4 期 戴煜彤,等:相关滤波的运动目标抗遮挡再跟踪技术 ·633·