正在加载图片...
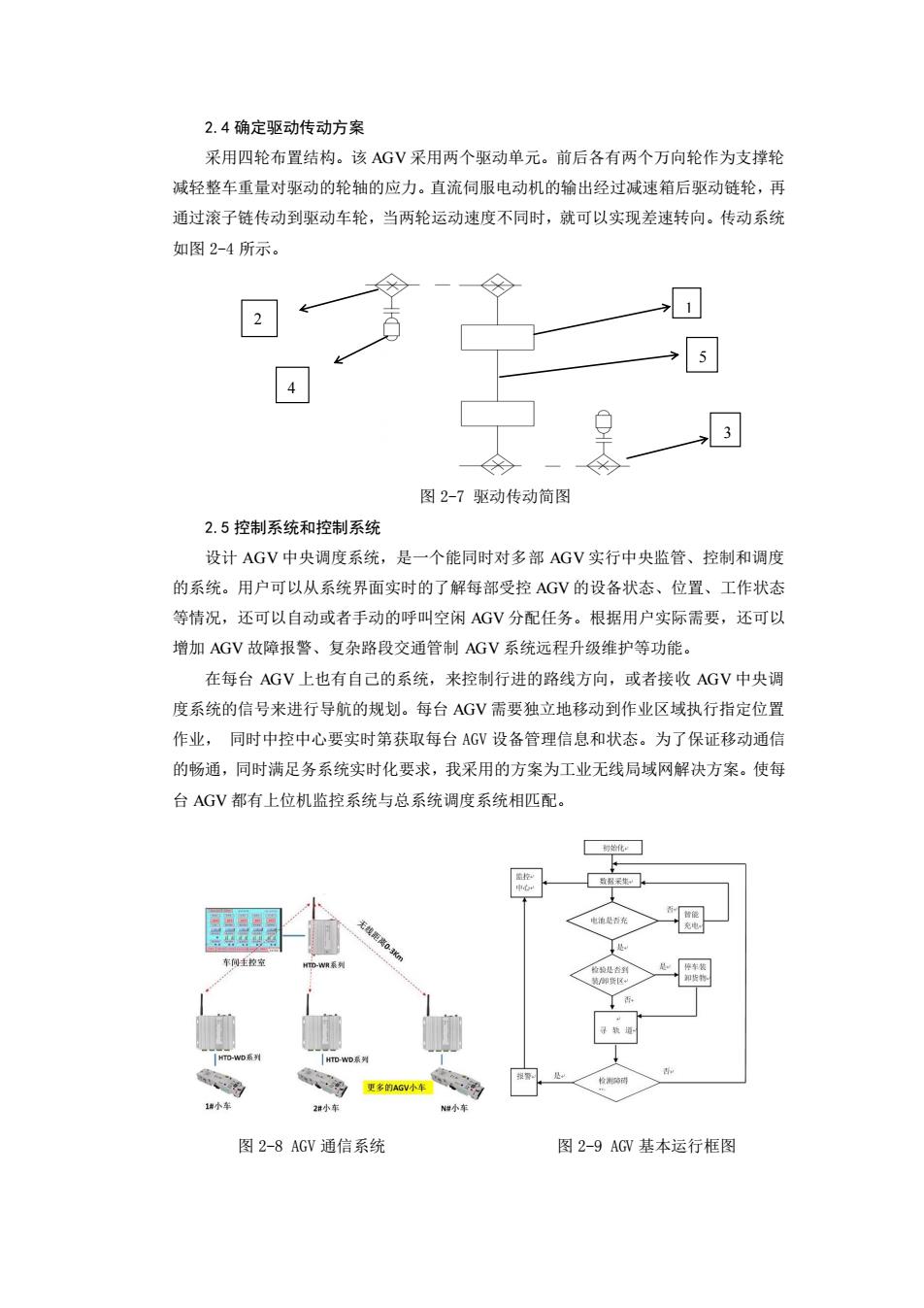
2.4确定驱动传动方案 采用四轮布置结构。该AGV采用两个驱动单元。前后各有两个万向轮作为支撑轮 减轻整车重量对驱动的轮轴的应力。直流伺服电动机的输出经过减速箱后驱动链轮,再 通过滚子链传动到驱动车轮,当两轮运动速度不同时,就可以实现差速转向。传动系统 如图2-4所示。 1 5 4 图2-7驱动传动简图 2.5控制系统和控制系统 设计AGV中央调度系统,是一个能同时对多部AGV实行中央监管、控制和调度 的系统。用户可以从系统界面实时的了解每部受控AGV的设备状态、位置、工作状态 等情况,还可以自动或者手动的呼叫空闲AGV分配任务。根据用户实际需要,还可以 增加AGV故障报警、复杂路段交通管制AGV系统远程升级维护等功能。 在每台AGV上也有自己的系统,来控制行进的路线方向,或者接收AGV中央调 度系统的信号来进行导航的规划。每台AGV需要独立地移动到作业区域执行指定位置 作业,同时中控中心要实时第获取每台AGV设备管理信息和状态。为了保证移动通信 的畅通,同时满足务系统实时化要求,我采用的方案为工业无线局域网解决方案。使每 台AGV都有上位机监控系统与总系统调度系统相匹配。 初始化 电是充 无线距离03球m ↓是 布间主控室 -W系 扣货风 TD-wD系到 HTD-WD.系到 更多的AGV小车 1小车 2#小车 N#小车 图2-8AGV通信系统 图2-9AGW基本运行框图2.4 确定驱动传动方案 采用四轮布置结构。该 AGV 采用两个驱动单元。前后各有两个万向轮作为支撑轮 减轻整车重量对驱动的轮轴的应力。直流伺服电动机的输出经过减速箱后驱动链轮,再 通过滚子链传动到驱动车轮,当两轮运动速度不同时,就可以实现差速转向。传动系统 如图 2-4 所示。 图 2-7 驱动传动简图 2.5 控制系统和控制系统 设计 AGV 中央调度系统,是一个能同时对多部 AGV 实行中央监管、控制和调度 的系统。用户可以从系统界面实时的了解每部受控 AGV 的设备状态、位置、工作状态 等情况,还可以自动或者手动的呼叫空闲 AGV 分配任务。根据用户实际需要,还可以 增加 AGV 故障报警、复杂路段交通管制 AGV 系统远程升级维护等功能。 在每台 AGV 上也有自己的系统,来控制行进的路线方向,或者接收 AGV 中央调 度系统的信号来进行导航的规划。每台 AGV 需要独立地移动到作业区域执行指定位置 作业, 同时中控中心要实时第获取每台 AGV 设备管理信息和状态。为了保证移动通信 的畅通,同时满足务系统实时化要求,我采用的方案为工业无线局域网解决方案。使每 台 AGV 都有上位机监控系统与总系统调度系统相匹配。 图 2-8 AGV 通信系统 图 2-9 AGV 基本运行框图 2 4 1 5 3