正在加载图片...
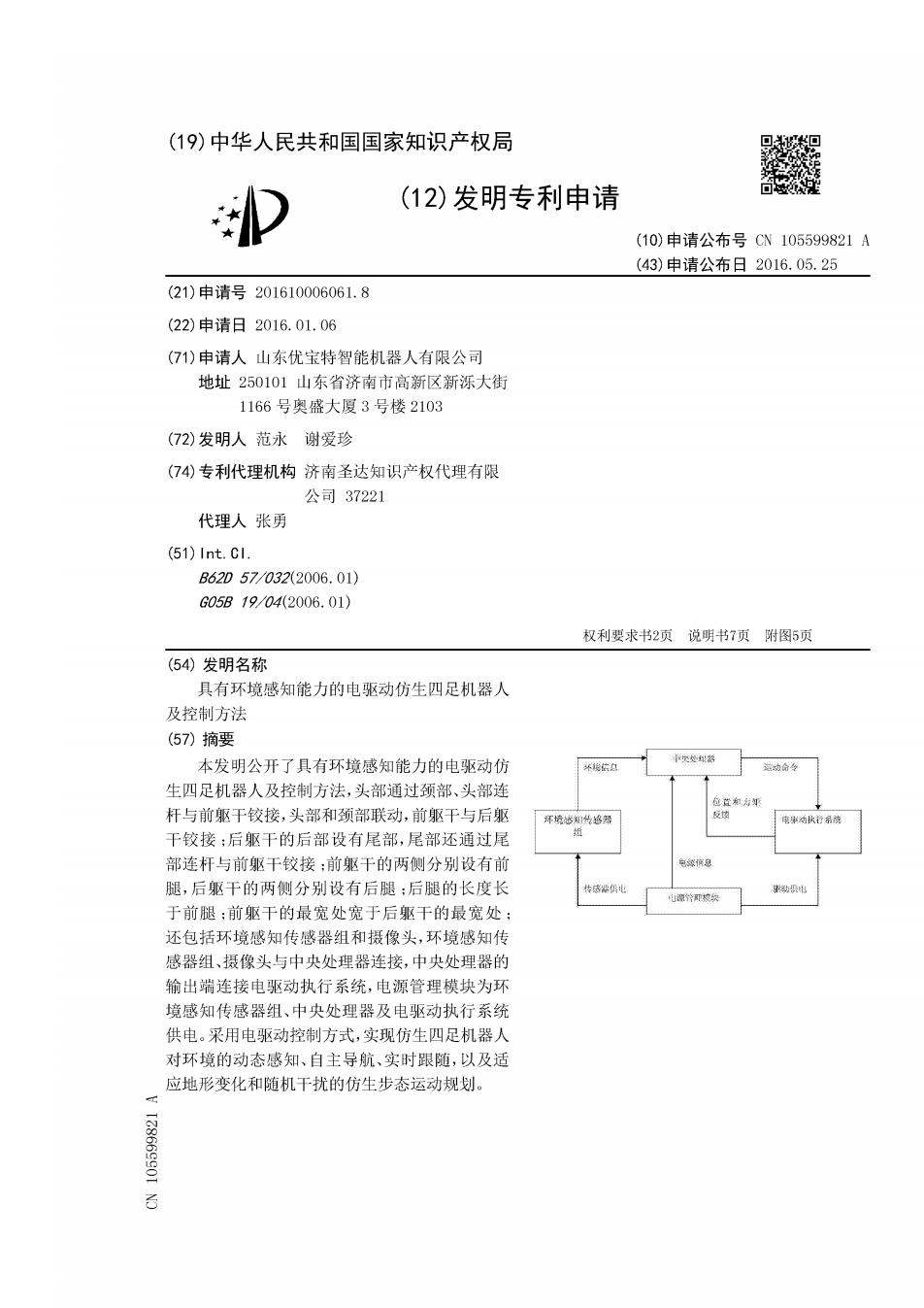
(19)中华人民共和国国家知识产权局 ▣▣ (12)发明专利申请 可 (10)申请公布号CN105599821A (43)申请公布日2016.05.25 (21)申请号201610006061.8 (22)申请日2016.01.06 (71)申请人山东优宝特智能机器人有限公司 地址250101山东省济南市高新区新泺大街 1166号奥盛大厦3号楼2103 (72)发明人范永谢爱珍 (74)专利代理机构济南圣达知识产权代理有限 公司37221 代理人张勇 (51)nt.Cl. B62D57/032(2006.01) G05B1904(2006.01) 权利要求书2页说明书7页附图5页 (54)发明名称 具有环境感知能力的电驱动仿生四足机器人 及控制方法 (57)摘要 本发明公开了具有环境感知能力的电驱动仿 样觉处纸器 生四足机器人及控制方法,头部通过颈部、头部连 位首和方平 杆与前躯干铰接,头部和颈部联动,前躯干与后躯 环境炒:郊器 反坡 电对执音余流 干铰接;后躯干的后部设有尾部,尾部还通过尾 部连杆与前躯干铰接:前躯干的两侧分别设有前 包解你息 腿,后躯干的两侧分别设有后腿:后腿的长度长 传感学负北 动出 于前腿:前躯干的最宽处宽于后躯干的最宽处: 还包括环境感知传感器组和摄像头,环境感知传 感器组、摄像头与中央处理器连接,中央处理器的 输出端连接电驱动执行系统,电源管理模块为环 境感知传感器组、中央处理器及电驱动执行系统 供电。采用电驱动控制方式,实现仿生四足机器人 对环境的动态感知、自主导航、实时跟随,以及适 应地形变化和随机干扰的仿生步态运动规划。 33669901 石