正在加载图片...
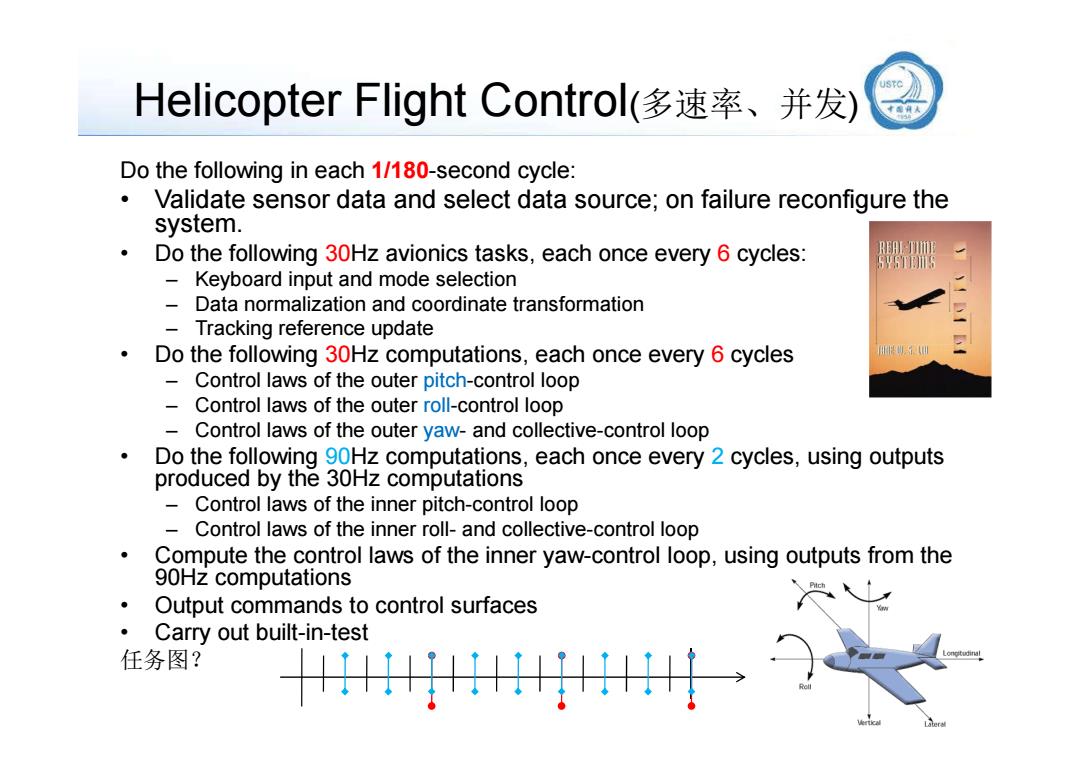
Helicopter Flight Control(多速率、并发) Do the following in each 1/180-second cycle: Validate sensor data and select data source;on failure reconfigure the system. Do the following 30Hz avionics tasks,each once every 6 cycles: RAm用 55T图 Keyboard input and mode selection Data normalization and coordinate transformation Tracking reference update 。 Do the following 30Hz computations,each once every 6 cycles 装3W Control laws of the outer pitch-control loop Control laws of the outer roll-control loop Control laws of the outer yaw-and collective-control loop Do the following 90Hz computations,each once every 2 cycles,using outputs produced by the 30Hz computations Control laws of the inner pitch-control loop Control laws of the inner roll-and collective-control loop Compute the control laws of the inner yaw-control loop,using outputs from the 90Hz computations Output commands to control surfaces 。 Carry out built-in-test 任务图? !2Helicopter Flight Control(多速率、并发) Do the following in each 1/180-second cycle: • Validate sensor data and select data source; on failure reconfigure the system. • Do the following 30Hz avionics tasks, each once every 6 cycles: – Keyboard input and mode selection – Data normalization and coordinate transformation – Tracking reference update • Do the following 30Hz computations, each once every 6 cycles – Control laws of the outer pitch-control loop – Control laws of the outer roll-control loop – Control laws of the outer yaw- and collective-control loop • Do the following 90Hz computations, each once every 2 cycles, using outputs produced by the 30Hz computations – Control laws of the inner pitch-control loop – Control laws of the inner roll- and collective-control loop • Compute the control laws of the inner yaw-control loop, using outputs from the 90Hz computations • Output commands to control surfaces • Carry out built-in-test 任务图?