正在加载图片...
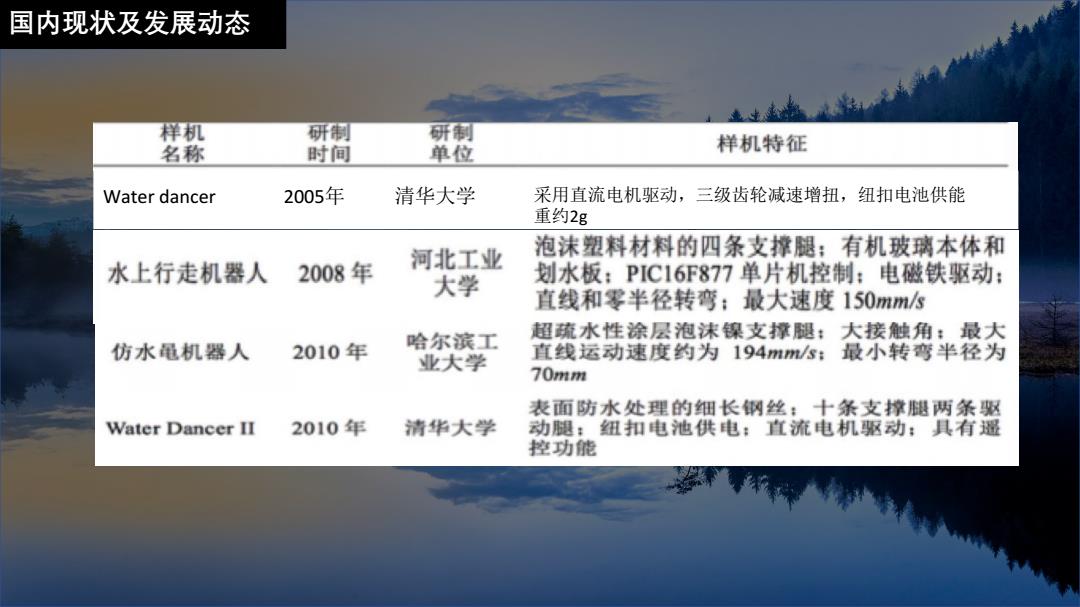
国内现状及发展动态 样机 研制 研制 名称 时间 单位 样机特征 Water dancer 2005年 清华大学 采用直流电机驱动,三级齿轮减速增扭,纽扣电池供能 重约2g 泡沫塑料材料的四条支撑腿:有机玻璃本体和 水上行走机器人 2008年 河北工业 大学 划水板:PIC16F877单片机控制:电磁铁驱动: 直线和零半径转弯:最大速度150mms 超疏水性涂层泡沫镍支撑腿:大接触角:最大 仿水龟机器人 2010年 哈尔滨工 业大学 直线运动速度约为194mms:最小转弯半径为 70mm 表面防水处理的细长钢丝:十条支撑腿两条驱 Water Dancer II 2010年 清华大学 动腿:纽扣电池供电:直流电机驱动:具有遥 控功能国内现状及发展动态 Water dancer 2005年 清华大学 采用直流电机驱动,三级齿轮减速增扭,纽扣电池供能 重约2g