正在加载图片...
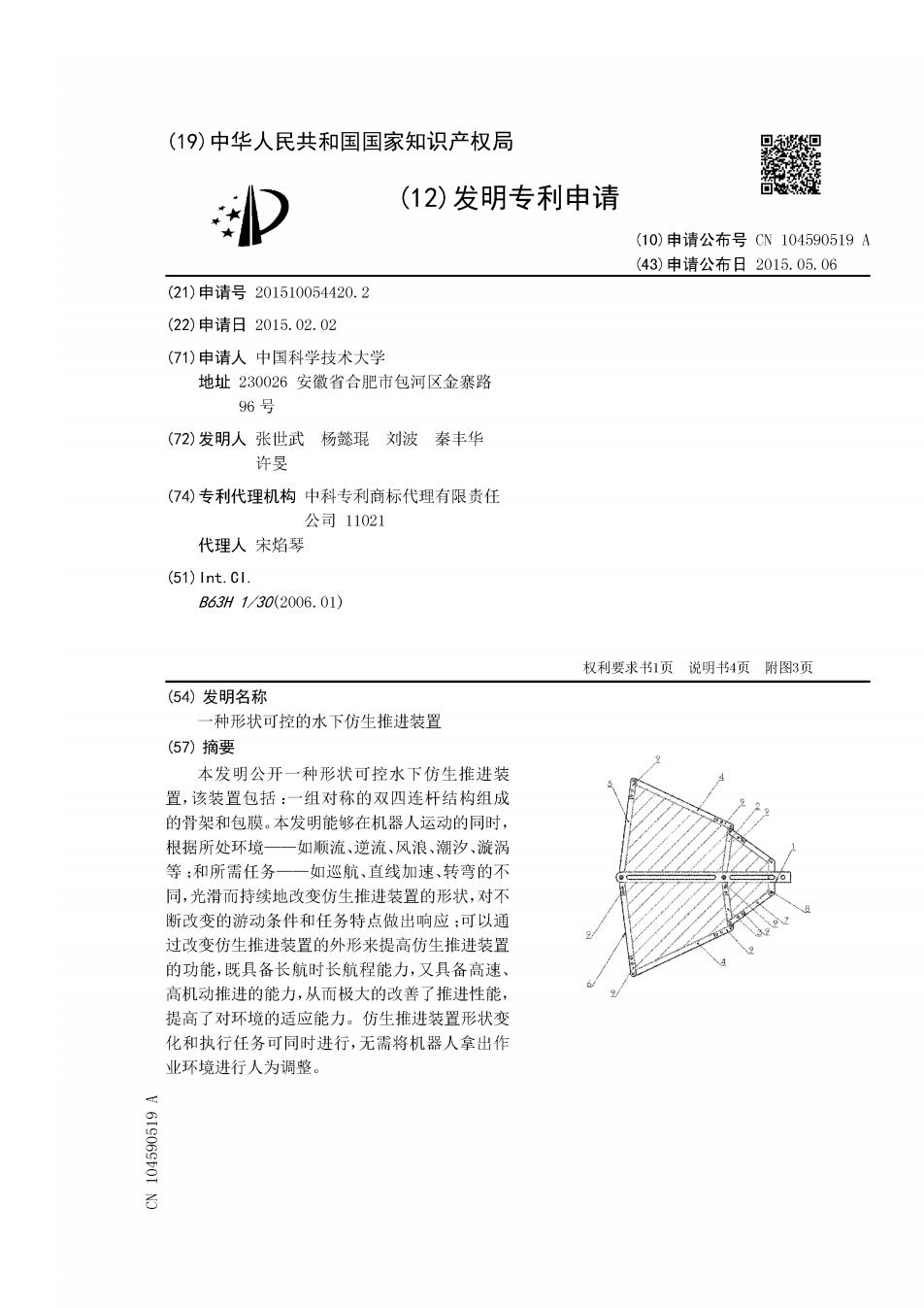
(19)中华人民共和国国家知识产权局 回▣ (12)发明专利申请 可 (10)申请公布号CN104590519A (43)申请公布日2015.05.06 (21)申请号201510054420.2 (22)申请日2015.02.02 (71)申请人中国科学技术大学 地址230026安徽省合肥市包河区金寨路 96号 (72)发明人张世武杨懿琨刘波秦丰华 许旻 (74)专利代理机构中科专利商标代理有限责任 公司11021 代理人宋焰琴 (51)Int.C1. B63H130(2006.01) 权利要求书1页说明书4页附图3页 (54)发明名称 一种形状可控的水下仿生推进装置 (57)摘要 本发明公开一种形状可控水下仿生推进装 置,该装置包括:一组对称的双四连杆结构组成 的骨架和包膜。本发明能够在机器人运动的同时, 根据所处环境一一如顺流、逆流、风浪、潮汐、漩涡 等:和所需任务一如巡航、直线加速、转弯的不 同,光滑而持续地改变仿生推进装置的形状,对不 断改变的游动条件和任务特点做出响应:可以通 过改变仿生推进装置的外形来提高仿生推进装置 的功能,既具备长航时长航程能力,又具备高速、 高机动推进的能力,从而极大的改善了推进性能, 提高了对环境的适应能力。仿生推进装置形状变 化和执行任务可同时进行,无需将机器人拿出作 业环境进行人为调整。 91006G50 石