正在加载图片...
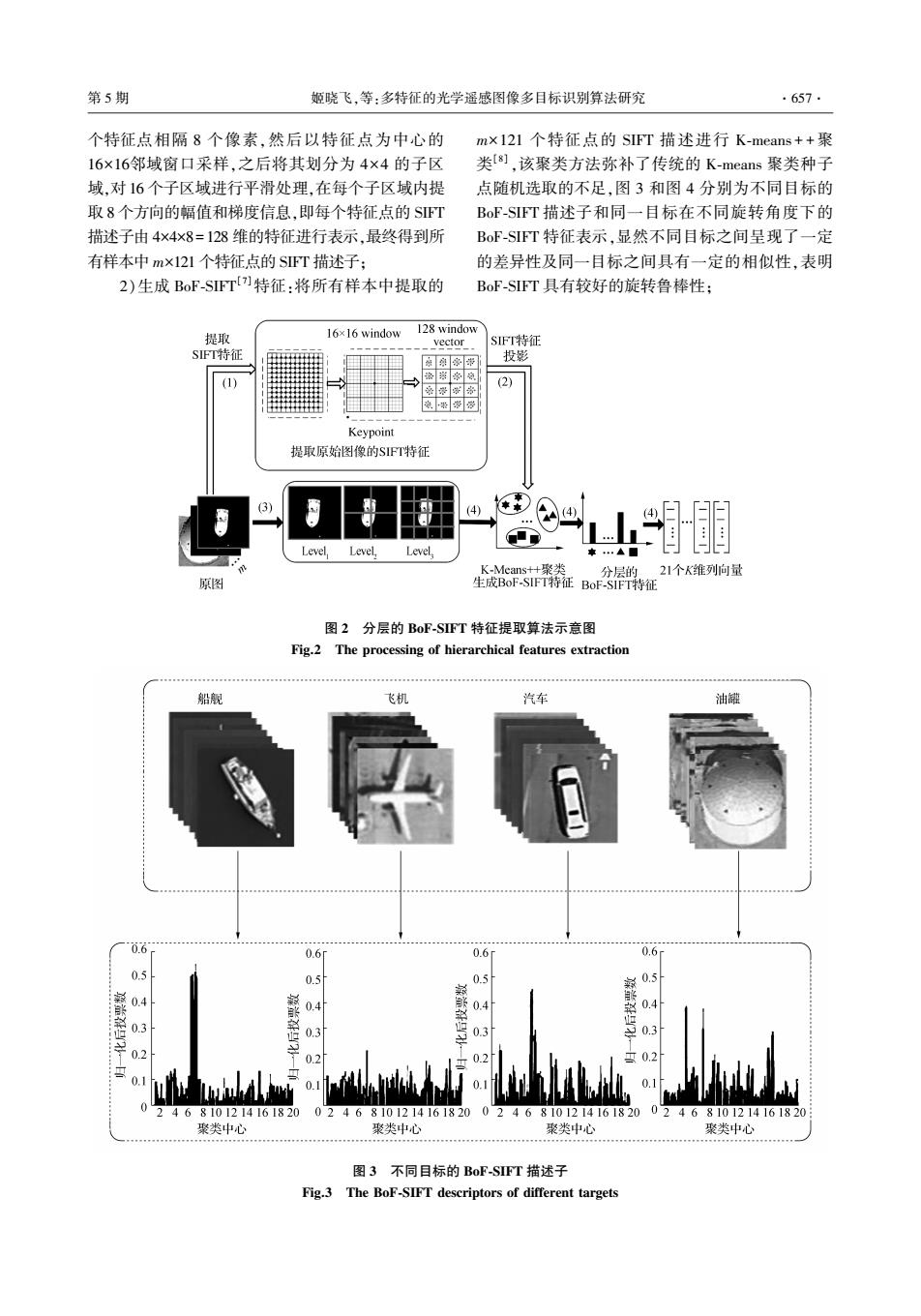
第5期 姬晓飞,等:多特征的光学遥感图像多目标识别算法研究 .657· 个特征点相隔8个像素,然后以特征点为中心的 m×l21个特征点的SlFT描述进行K-means++聚 16×16邻域窗口采样,之后将其划分为4×4的子区 类[劉,该聚类方法弥补了传统的K-means聚类种子 域,对16个子区域进行平滑处理,在每个子区域内提 点随机选取的不足,图3和图4分别为不同目标的 取8个方向的幅值和梯度信息,即每个特征点的ST BoF-SIFT描述子和同一目标在不同旋转角度下的 描述子由4×4×8=128维的特征进行表示,最终得到所 BoF-SIFT特征表示,显然不同目标之间呈现了一定 有样本中m×121个特征点的ST描述子; 的差异性及同一目标之间具有一定的相似性,表明 2)生成BoF-SFT]特征:将所有样本中提取的 BoF-SIFT具有较好的旋转鲁棒性; 提取 16×16 window 128 window vector SIFT特征 SFT特征 解鼻多带 投影 (1) 密密流 (2) ※漫岁常 拼 Keypoint 提取原始图像的SIFT特征 (3) 4) 山围 Level, Level. Level K-Means+聚类 分层的21个维列向量 原图 生成BoF-SIFT特征BoF-SIFT特征 图2分层的BoF-SFT特征提取算法示意图 Fig.2 The processing of hierarchical features extraction 船舰 飞机 汽车 油罐 0.6 0.6 0.6 0.5 0.5 0.4 0.4 0.4 0.3 0.3 0.3 0.2 0.1 0.1 0.1 2468101214161820 02468101214161820 02468101214161820 0 46810121416182 聚类中心 聚类中心 聚类中心 聚类中心 图3不同目标的BoF-SFT描述子 Fig.3 The BoF-SIFT descriptors of different targets个特征点相隔 8 个像素,然后以特征点为中心的 16×16邻域窗口采样,之后将其划分为 4×4 的子区 域,对 16 个子区域进行平滑处理,在每个子区域内提 取 8 个方向的幅值和梯度信息,即每个特征点的 SIFT 描述子由 4×4×8= 128 维的特征进行表示,最终得到所 有样本中 m×121 个特征点的 SIFT 描述子; 2)生成 BoF⁃SIFT [7]特征:将所有样本中提取的 m×121 个特征点的 SIFT 描述进行 K⁃means + +聚 类[8] ,该聚类方法弥补了传统的 K⁃means 聚类种子 点随机选取的不足,图 3 和图 4 分别为不同目标的 BoF⁃SIFT 描述子和同一目标在不同旋转角度下的 BoF⁃SIFT 特征表示,显然不同目标之间呈现了一定 的差异性及同一目标之间具有一定的相似性,表明 BoF⁃SIFT 具有较好的旋转鲁棒性; 图 2 分层的 BoF⁃SIFT 特征提取算法示意图 Fig.2 The processing of hierarchical features extraction 图 3 不同目标的 BoF⁃SIFT 描述子 Fig.3 The BoF⁃SIFT descriptors of different targets 第 5 期 姬晓飞,等:多特征的光学遥感图像多目标识别算法研究 ·657·