正在加载图片...
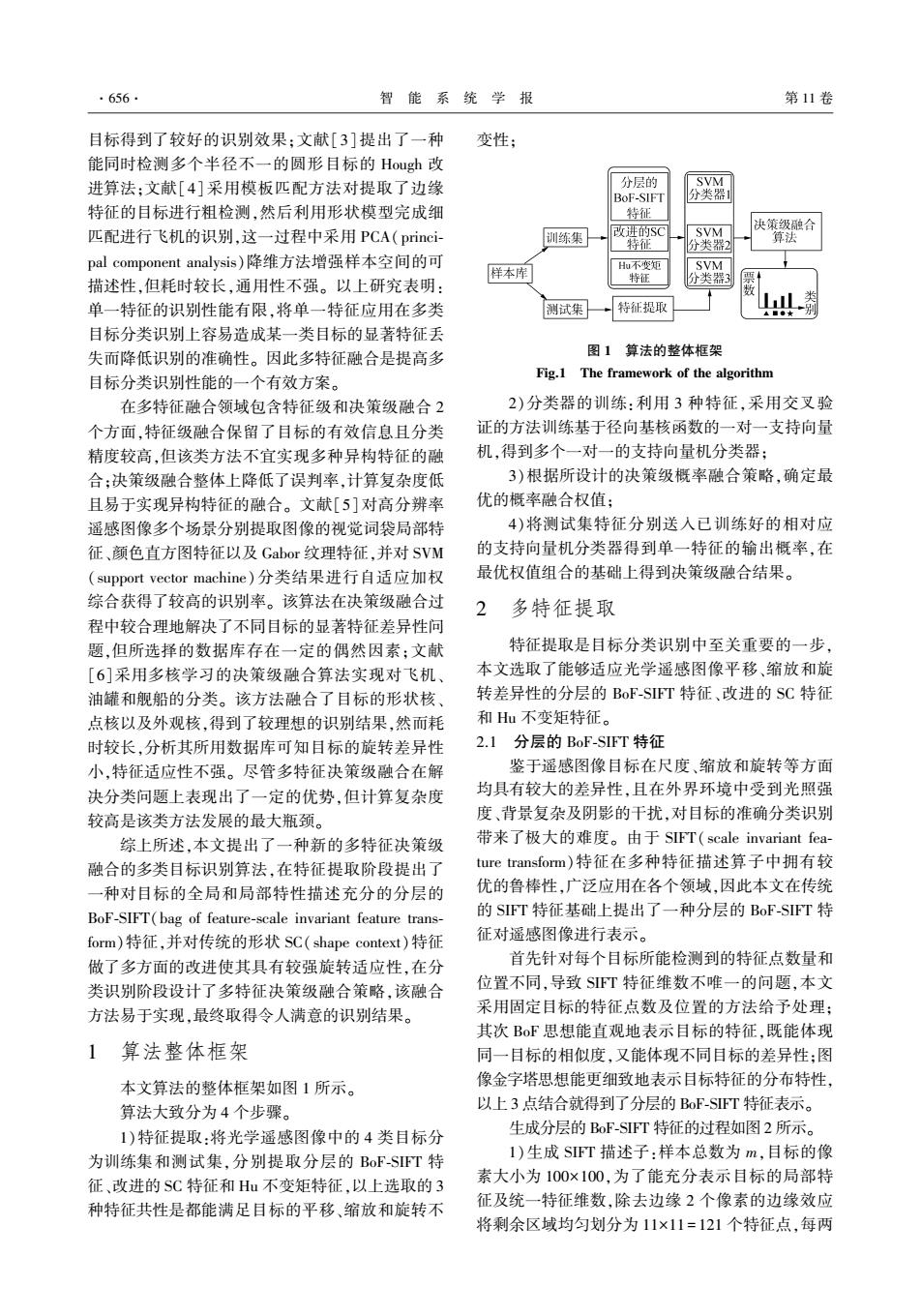
·656 智能系统学报 第11卷 目标得到了较好的识别效果:文献[3]提出了一种 变性; 能同时检测多个半径不一的圆形目标的Hough改 进算法;文献[4]采用模板匹配方法对提取了边缘 分层的 SVM BoF-SIFT 分类器 特征的目标进行粗检测,然后利用形状模型完成细 特征 决策级融合 匹配进行飞机的识别,这一过程中采用PCA(princi- 训练集 改进的SC SVM 特征 分类器2 算法 pal component analysis)降维方法增强样本空间的可 H不店币 样本库 SVM 描述性,但耗时较长,通用性不强。以上研究表明: 特征 分类器3 类 单一特征的识别性能有限,将单一特征应用在多类 测试集 特征提取 目标分类识别上容易造成某一类目标的显著特征丢 失而降低识别的准确性。因此多特征融合是提高多 图1算法的整体框架 Fig.1 The framework of the algorithm 目标分类识别性能的一个有效方案。 在多特征融合领域包含特征级和决策级融合2 2)分类器的训练:利用3种特征,采用交叉验 个方面,特征级融合保留了目标的有效信息且分类 证的方法训练基于径向基核函数的一对一支持向量 精度较高,但该类方法不宜实现多种异构特征的融 机,得到多个一对一的支持向量机分类器: 合;决策级融合整体上降低了误判率,计算复杂度低 3)根据所设计的决策级概率融合策略,确定最 且易于实现异构特征的融合。文献[5]对高分辨率 优的概率融合权值: 遥感图像多个场景分别提取图像的视觉词袋局部特 4)将测试集特征分别送入已训练好的相对应 征、颜色直方图特征以及Gabor纹理特征,并对SVM 的支持向量机分类器得到单一特征的输出概率,在 (support vector machine)分类结果进行自适应加权 最优权值组合的基础上得到决策级融合结果。 综合获得了较高的识别率。该算法在决策级融合过 2多特征提取 程中较合理地解决了不同目标的显著特征差异性问 题,但所选择的数据库存在一定的偶然因素;文献 特征提取是目标分类识别中至关重要的一步 [6]采用多核学习的决策级融合算法实现对飞机、 本文选取了能够适应光学遥感图像平移、缩放和旋 油罐和舰船的分类。该方法融合了目标的形状核、 转差异性的分层的BoF-SIFT特征、改进的SC特征 点核以及外观核,得到了较理想的识别结果,然而耗 和Hu不变矩特征。 时较长,分析其所用数据库可知目标的旋转差异性 2.1分层的BoF-SIFT特征 小,特征适应性不强。尽管多特征决策级融合在解 鉴于遥感图像目标在尺度、缩放和旋转等方面 决分类问题上表现出了一定的优势,但计算复杂度 均具有较大的差异性,且在外界环境中受到光照强 较高是该类方法发展的最大瓶颈。 度、背景复杂及阴影的干扰,对目标的准确分类识别 综上所述,本文提出了一种新的多特征决策级 带来了极大的难度。由于SIFT(scale invariant fea- 融合的多类目标识别算法,在特征提取阶段提出了 ture transform)特征在多种特征描述算子中拥有较 一种对目标的全局和局部特性描述充分的分层的 优的鲁棒性,广泛应用在各个领域,因此本文在传统 BoF-SIFT(bag of feature-scale invariant feature trans- 的SIFT特征基础上提出了一种分层的BoF-SIFT特 form)特征,并对传统的形状SC(shape context)特征 征对遥感图像进行表示。 做了多方面的改进使其具有较强旋转适应性,在分 首先针对每个目标所能检测到的特征点数量和 类识别阶段设计了多特征决策级融合策略,该融合 位置不同,导致SFT特征维数不唯一的问题,本文 方法易于实现,最终取得令人满意的识别结果。 采用固定目标的特征点数及位置的方法给予处理: 其次BoF思想能直观地表示目标的特征,既能体现 1 算法整体框架 同一目标的相似度,又能体现不同目标的差异性:图 本文算法的整体框架如图1所示。 像金字塔思想能更细致地表示目标特征的分布特性, 算法大致分为4个步骤。 以上3点结合就得到了分层的BoF-SFT特征表示。 1)特征提取:将光学遥感图像中的4类目标分 生成分层的BoF-SFT特征的过程如图2所示。 为训练集和测试集,分别提取分层的BoF-SFT特 1)生成SFT描述子:样本总数为m,目标的像 征、改进的SC特征和Hu不变矩特征,以上选取的3 素大小为100×100,为了能充分表示目标的局部特 种特征共性是都能满足目标的平移、缩放和旋转不 征及统一特征维数,除去边缘2个像素的边缘效应 将剩余区域均匀划分为11×11=121个特征点,每两目标得到了较好的识别效果;文献[3]提出了一种 能同时检测多个半径不一的圆形目标的 Hough 改 进算法;文献[4]采用模板匹配方法对提取了边缘 特征的目标进行粗检测,然后利用形状模型完成细 匹配进行飞机的识别,这一过程中采用 PCA(princi⁃ pal component analysis)降维方法增强样本空间的可 描述性,但耗时较长,通用性不强。 以上研究表明: 单一特征的识别性能有限,将单一特征应用在多类 目标分类识别上容易造成某一类目标的显著特征丢 失而降低识别的准确性。 因此多特征融合是提高多 目标分类识别性能的一个有效方案。 在多特征融合领域包含特征级和决策级融合 2 个方面,特征级融合保留了目标的有效信息且分类 精度较高,但该类方法不宜实现多种异构特征的融 合;决策级融合整体上降低了误判率,计算复杂度低 且易于实现异构特征的融合。 文献[5]对高分辨率 遥感图像多个场景分别提取图像的视觉词袋局部特 征、颜色直方图特征以及 Gabor 纹理特征,并对 SVM (support vector machine)分类结果进行自适应加权 综合获得了较高的识别率。 该算法在决策级融合过 程中较合理地解决了不同目标的显著特征差异性问 题,但所选择的数据库存在一定的偶然因素;文献 [6]采用多核学习的决策级融合算法实现对飞机、 油罐和舰船的分类。 该方法融合了目标的形状核、 点核以及外观核,得到了较理想的识别结果,然而耗 时较长,分析其所用数据库可知目标的旋转差异性 小,特征适应性不强。 尽管多特征决策级融合在解 决分类问题上表现出了一定的优势,但计算复杂度 较高是该类方法发展的最大瓶颈。 综上所述,本文提出了一种新的多特征决策级 融合的多类目标识别算法,在特征提取阶段提出了 一种对目标的全局和局部特性描述充分的分层的 BoF⁃SIFT(bag of feature⁃scale invariant feature trans⁃ form)特征,并对传统的形状 SC(shape context)特征 做了多方面的改进使其具有较强旋转适应性,在分 类识别阶段设计了多特征决策级融合策略,该融合 方法易于实现,最终取得令人满意的识别结果。 1 算法整体框架 本文算法的整体框架如图 1 所示。 算法大致分为 4 个步骤。 1)特征提取:将光学遥感图像中的 4 类目标分 为训练集和测试集,分别提取分层的 BoF⁃SIFT 特 征、改进的 SC 特征和 Hu 不变矩特征,以上选取的 3 种特征共性是都能满足目标的平移、缩放和旋转不 变性; 图 1 算法的整体框架 Fig.1 The framework of the algorithm 2)分类器的训练:利用 3 种特征,采用交叉验 证的方法训练基于径向基核函数的一对一支持向量 机,得到多个一对一的支持向量机分类器; 3)根据所设计的决策级概率融合策略,确定最 优的概率融合权值; 4)将测试集特征分别送入已训练好的相对应 的支持向量机分类器得到单一特征的输出概率,在 最优权值组合的基础上得到决策级融合结果。 2 多特征提取 特征提取是目标分类识别中至关重要的一步, 本文选取了能够适应光学遥感图像平移、缩放和旋 转差异性的分层的 BoF⁃SIFT 特征、改进的 SC 特征 和 Hu 不变矩特征。 2.1 分层的 BoF⁃SIFT 特征 鉴于遥感图像目标在尺度、缩放和旋转等方面 均具有较大的差异性,且在外界环境中受到光照强 度、背景复杂及阴影的干扰,对目标的准确分类识别 带来了极大的难度。 由于 SIFT( scale invariant fea⁃ ture transform)特征在多种特征描述算子中拥有较 优的鲁棒性,广泛应用在各个领域,因此本文在传统 的 SIFT 特征基础上提出了一种分层的 BoF⁃SIFT 特 征对遥感图像进行表示。 首先针对每个目标所能检测到的特征点数量和 位置不同,导致 SIFT 特征维数不唯一的问题,本文 采用固定目标的特征点数及位置的方法给予处理; 其次 BoF 思想能直观地表示目标的特征,既能体现 同一目标的相似度,又能体现不同目标的差异性;图 像金字塔思想能更细致地表示目标特征的分布特性, 以上 3 点结合就得到了分层的 BoF⁃SIFT 特征表示。 生成分层的 BoF⁃SIFT 特征的过程如图 2 所示。 1)生成 SIFT 描述子:样本总数为 m,目标的像 素大小为 100×100,为了能充分表示目标的局部特 征及统一特征维数,除去边缘 2 个像素的边缘效应 将剩余区域均匀划分为 11×11 = 121 个特征点,每两 ·656· 智 能 系 统 学 报 第 11 卷