正在加载图片...
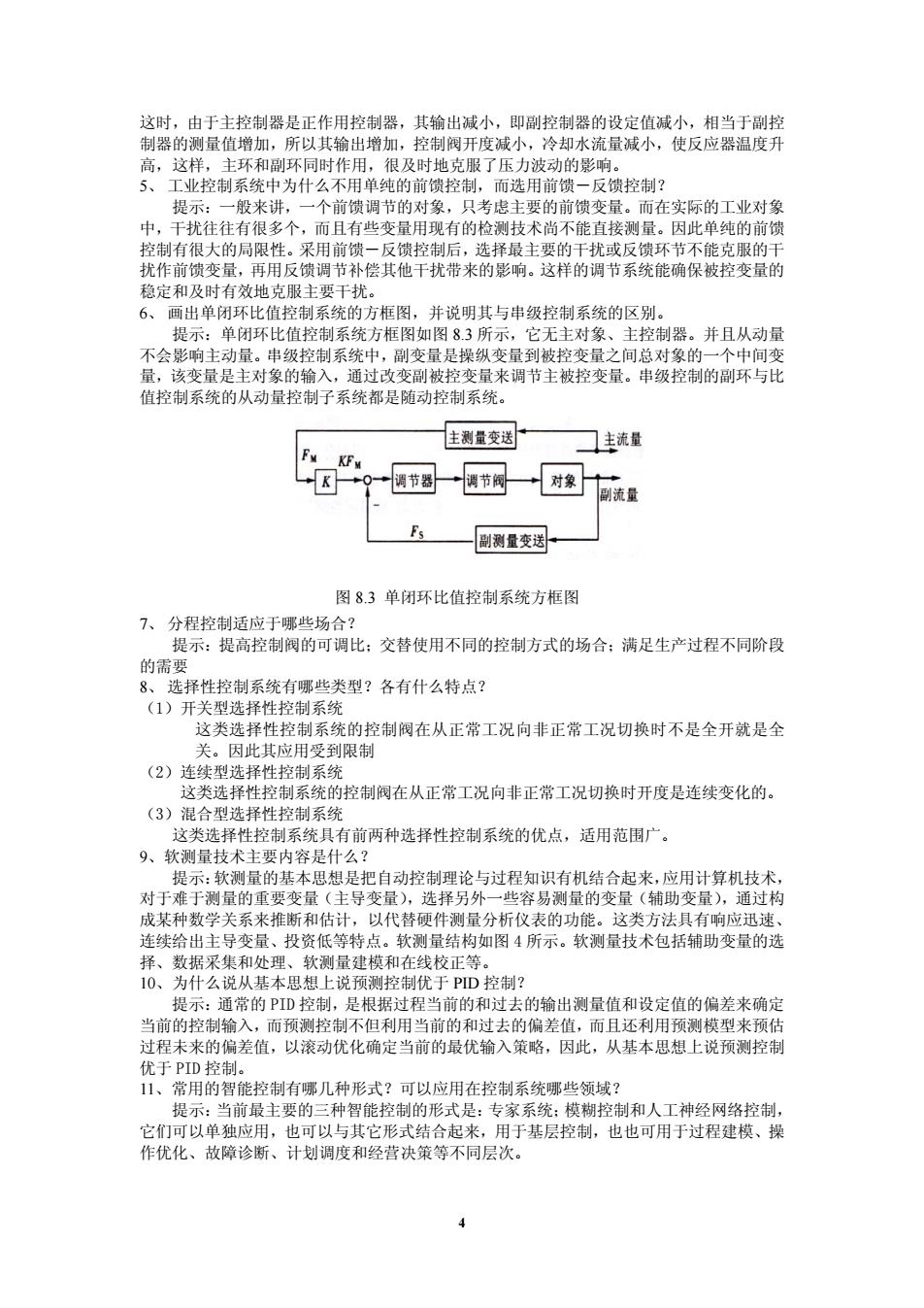
这时,由于主控制器是正作用控制器,其输出减小,即副控制器的设定值减小,相当于副控 制器的测量值增加,所以其输出增加,控制阀开度减小,冷却水流量减小,使反应器温度升 高,这样,主环和副环同时作用,很及时地克服了压力波动的影响。 5、工业控制系统中为什么不用单纯的前馈控制,而选用前馈一反馈控制? 提示:一般来讲,一个前馈调节的对象,只考虑主要的前馈变量。而在实际的工业对象 中,干扰往往有很多个,而且有些变量用现有的检测技术尚不能直接测量。因此单纯的前馈 控制有很大的局限性。采用前馈一反馈控制后,选择最主要的干扰或反馈环节不能克服的干 扰作前馈变量,再用反馈调节补偿其他干扰带来的影响。这样的调节系统能确保被控变量的 稳定和及时有效地克服主要干扰。 6、画出单闭环比值控制系统的方框图,并说明其与串级控制系统的区别。 提示:单闭环比值控制系统方框图如图83所示,它无主对象、主控制器。并且从动量 不会影响主动量。串级控制系统中,副变量是操纵变量到被控变量之间总对象的一个中间变 量,该变量是主对象的输入,通过改变副被控变量来调节主被控变量。串级控制的副环与比 值控制系统的从动量控制子系统都是随动控制系统。 主测量变送 主流量 调节器 调节 对象 副流量 5 副测量变送 图8.3单闭环比值控制系统方框图 7、分程控制适应于哪些场合? 提示:提高控制阀的可调比:交替使用不同的控制方式的场合:满足生产过程不同阶段 的需要 8、选择性控制系统有哪些类型?各有什么特点? (1)开关型选择性控制系统 这类选择性控制系统的控制阀在从正常工况向非正常工况切换时不是全开就是全 关。因此其应用受到限制 (2)连续型选择性控制系统 这类选择性控制系统的控制阀在从正常工况向非正常工况切换时开度是连续变化的。 (3)混合型选择性控制系统 这类选择性控制系统具有前两种选择性控制系统的优点,适用范围广。 9、软测量技术主要内容是什么? 提示:软测量的基本思想是把自动控制理论与过程知识有机结合起来,应用计算机技术, 对于难于测量的重要变量(主导变量),选择另外一些容易测量的变量(辅助变量),通过构 成某种数学关系来推断和估计,以代替硬件测量分析仪表的功能。这类方法具有响应迅速、 连续给出主导变量、投资低等特点。软测量结构如图4所示。软测量技术包括辅助变量的选 择、数据采集和处理、软测量建模和在线校正等。 10、为什么说从基本思想上说预测控制优于PD控制? 提示:通常的PID控制,是根据过程当前的和过去的输出测量值和设定值的偏差来确定 当前的控制输入,而预测控制不但利用当前的和过去的偏差值,而且还利用预测模型来预估 过程未来的偏差值,以滚动优化确定当前的最优输入策略,因此,从基本思想上说预测控制 优于PID控制。 11、常用的智能控制有哪几种形式?可以应用在控制系统哪些领域? 提示:当前最主要的三种智能控制的形式是:专家系统:模糊控制和人工神经网络控制, 它们可以单独应用,也可以与其它形式结合起来,用于基层控制,也也可用于过程建模、操 作优化、故障诊断、计划调度和经营决策等不同层次。这时,由于主控制器是正作用控制器,其输出减小,即副控制器的设定值减小,相当于副控 制器的测量值增加,所以其输出增加,控制阀开度减小,冷却水流量减小,使反应器温度升 高,这样,主环和副环同时作用,很及时地克服了压力波动的影响。 5、 工业控制系统中为什么不用单纯的前馈控制,而选用前馈-反馈控制? 提示:一般来讲,一个前馈调节的对象,只考虑主要的前馈变量。而在实际的工业对象 中,干扰往往有很多个,而且有些变量用现有的检测技术尚不能直接测量。因此单纯的前馈 控制有很大的局限性。采用前馈-反馈控制后,选择最主要的干扰或反馈环节不能克服的干 扰作前馈变量,再用反馈调节补偿其他干扰带来的影响。这样的调节系统能确保被控变量的 稳定和及时有效地克服主要干扰。 6、 画出单闭环比值控制系统的方框图,并说明其与串级控制系统的区别。 提示:单闭环比值控制系统方框图如图 8.3 所示,它无主对象、主控制器。并且从动量 不会影响主动量。串级控制系统中,副变量是操纵变量到被控变量之间总对象的一个中间变 量,该变量是主对象的输入,通过改变副被控变量来调节主被控变量。串级控制的副环与比 值控制系统的从动量控制子系统都是随动控制系统。 图 8.3 单闭环比值控制系统方框图 7、 分程控制适应于哪些场合? 提示:提高控制阀的可调比;交替使用不同的控制方式的场合;满足生产过程不同阶段 的需要 8、 选择性控制系统有哪些类型?各有什么特点? (1)开关型选择性控制系统 这类选择性控制系统的控制阀在从正常工况向非正常工况切换时不是全开就是全 关。因此其应用受到限制 (2)连续型选择性控制系统 这类选择性控制系统的控制阀在从正常工况向非正常工况切换时开度是连续变化的。 (3)混合型选择性控制系统 这类选择性控制系统具有前两种选择性控制系统的优点,适用范围广。 9、软测量技术主要内容是什么? 提示:软测量的基本思想是把自动控制理论与过程知识有机结合起来,应用计算机技术, 对于难于测量的重要变量(主导变量),选择另外一些容易测量的变量(辅助变量),通过构 成某种数学关系来推断和估计,以代替硬件测量分析仪表的功能。这类方法具有响应迅速、 连续给出主导变量、投资低等特点。软测量结构如图 4 所示。软测量技术包括辅助变量的选 择、数据采集和处理、软测量建模和在线校正等。 10、为什么说从基本思想上说预测控制优于 PID 控制? 提示:通常的 PID 控制,是根据过程当前的和过去的输出测量值和设定值的偏差来确定 当前的控制输入,而预测控制不但利用当前的和过去的偏差值,而且还利用预测模型来预估 过程未来的偏差值,以滚动优化确定当前的最优输入策略,因此,从基本思想上说预测控制 优于 PID 控制。 11、常用的智能控制有哪几种形式?可以应用在控制系统哪些领域? 提示:当前最主要的三种智能控制的形式是:专家系统;模糊控制和人工神经网络控制, 它们可以单独应用,也可以与其它形式结合起来,用于基层控制,也也可用于过程建模、操 作优化、故障诊断、计划调度和经营决策等不同层次。 4