正在加载图片...
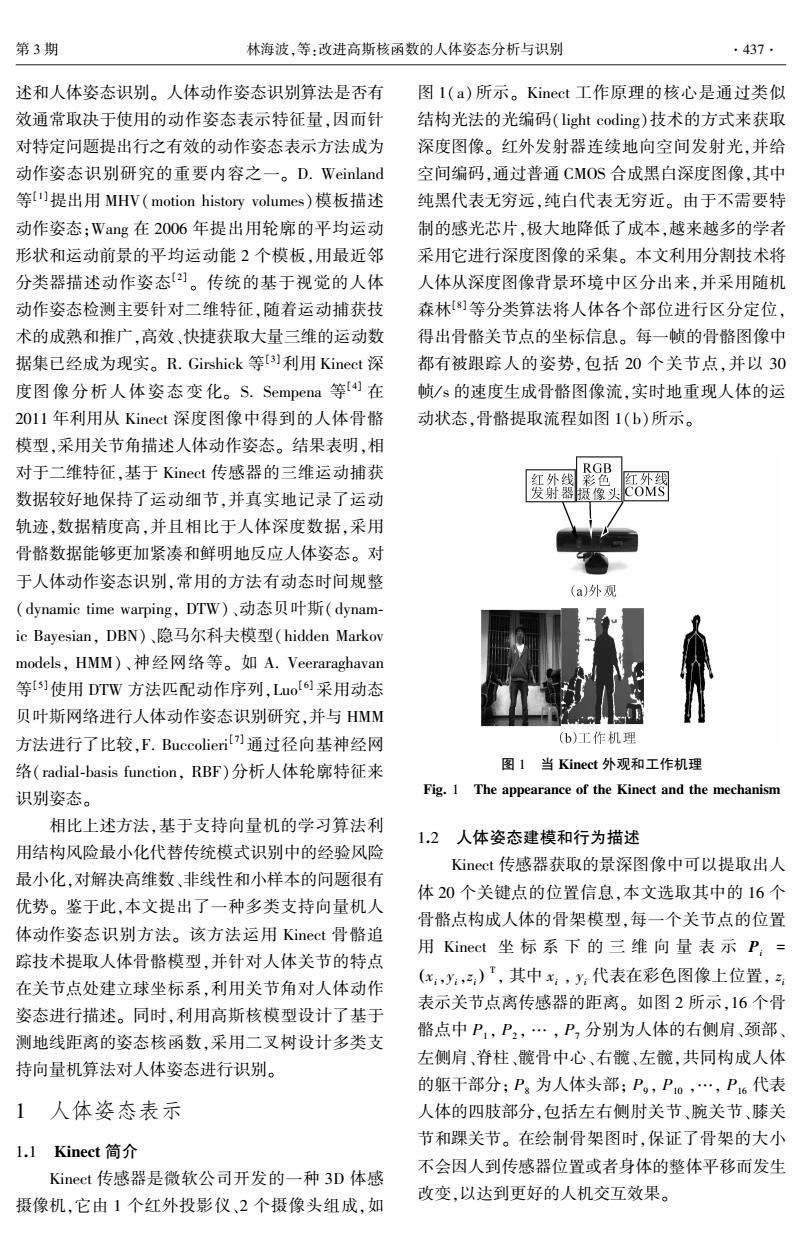
第3期 林海波,等:改进高斯核函数的人体姿态分析与识别 ·437. 述和人体姿态识别。人体动作姿态识别算法是否有 图I(a)所示。Kinect工作原理的核心是通过类似 效通常取决于使用的动作姿态表示特征量,因而针 结构光法的光编码(light coding)技术的方式来获取 对特定问题提出行之有效的动作姿态表示方法成为 深度图像。红外发射器连续地向空间发射光,并给 动作姿态识别研究的重要内容之一。D.Weinland 空间编码,通过普通CMOS合成黑白深度图像,其中 等)提出用MHV(motion history volumes)模板描述 纯黑代表无穷远,纯白代表无穷近。由于不需要特 动作姿态:Wang在2006年提出用轮廓的平均运动 制的感光芯片,极大地降低了成本,越来越多的学者 形状和运动前景的平均运动能2个模板,用最近邻 采用它进行深度图像的采集。本文利用分割技术将 分类器描述动作姿态2)。传统的基于视觉的人体 人体从深度图像背景环境中区分出来,并采用随机 动作姿态检测主要针对二维特征,随着运动捕获技 森林[劉等分类算法将人体各个部位进行区分定位, 术的成熟和推广,高效、快捷获取大量三维的运动数 得出骨骼关节点的坐标信息。每一帧的骨骼图像中 据集已经成为现实。R.Girshick等[)利用Kinect深 都有被跟踪人的姿势,包括20个关节点,并以30 度图像分析人体姿态变化。S.Sempena等4)在 帧/s的速度生成骨骼图像流,实时地重现人体的运 20l1年利用从Kinect深度图像中得到的人体骨骼 动状态,骨骼提取流程如图1(b)所示。 模型,采用关节角描述人体动作姿态。结果表明,相 对于二维特征,基于Kinect传感器的三维运动捕获 RGB 工外线 数据较好地保持了运动细节,并真实地记录了运动 OMS 轨迹,数据精度高,并且相比于人体深度数据,采用 骨骼数据能够更加紧凑和鲜明地反应人体姿态。对 于人体动作姿态识别,常用的方法有动态时间规整 (a)外观 (dynamic time warping,DTW)、动态贝叶斯(dynam- ic Bayesian,DBN)、隐马尔科夫模型(hidden Markov models,HMM)、神经网络等。如A.Veeraraghavan 等s]使用DTW方法匹配动作序列,Luo6)采用动态 贝叶斯网络进行人体动作姿态识别研究,并与HMM 方法进行了比较,F.Buccolieri通过径向基神经网 (b)工作机理 络(radial--basis function,RBF)分析人体轮廓特征来 图1当Kinect外观和工作机理 识别姿态。 Fig.1 The appearance of the Kinect and the mechanism 相比上述方法,基于支持向量机的学习算法利 1.2人体姿态建模和行为描述 用结构风险最小化代替传统模式识别中的经验风险 Kinect传感器获取的景深图像中可以提取出人 最小化,对解决高维数、非线性和小样本的问题很有 体20个关键点的位置信息,本文选取其中的16个 优势。鉴于此,本文提出了一种多类支持向量机人 骨骼点构成人体的骨架模型,每一个关节点的位置 体动作姿态识别方法。该方法运用Kinect骨骼追 用Kinect坐标系下的三维向量表示P:= 踪技术提取人体骨骼模型,并针对人体关节的特点 在关节点处建立球坐标系,利用关节角对人体动作 (x,),其中x:,y:代表在彩色图像上位置,云 表示关节点离传感器的距离。如图2所示,16个骨 姿态进行描述。同时,利用高斯核模型设计了基于 骼点中P,P2,…,P,分别为人体的右侧肩、颈部 测地线距离的姿态核函数,采用二叉树设计多类支 左侧肩、脊柱、髋骨中心、右髋、左髋,共同构成人体 持向量机算法对人体姿态进行识别。 的躯干部分:P。为人体头部;Pg,Po,…,P6代表 1人体姿态表示 人体的四肢部分,包括左右侧肘关节、腕关节、膝关 节和踝关节。在绘制骨架图时,保证了骨架的大小 1.1 Kinect简介 不会因人到传感器位置或者身体的整体平移而发生 Kinect传感器是微软公司开发的一种3D体感 改变,以达到更好的人机交互效果。 摄像机,它由1个红外投影仪、2个摄像头组成,如述和人体姿态识别。 人体动作姿态识别算法是否有 效通常取决于使用的动作姿态表示特征量,因而针 对特定问题提出行之有效的动作姿态表示方法成为 动作姿态识别研究的重要内容之一。 D. Weinland 等[1]提出用 MHV(motion history volumes)模板描述 动作姿态;Wang 在 2006 年提出用轮廓的平均运动 形状和运动前景的平均运动能 2 个模板,用最近邻 分类器描述动作姿态[2] 。 传统的基于视觉的人体 动作姿态检测主要针对二维特征,随着运动捕获技 术的成熟和推广,高效、快捷获取大量三维的运动数 据集已经成为现实。 R. Girshick 等[3]利用 Kinect 深 度图像分析人体姿 态 变 化。 S. Sempena 等[4] 在 2011 年利用从 Kinect 深度图像中得到的人体骨骼 模型,采用关节角描述人体动作姿态。 结果表明,相 对于二维特征,基于 Kinect 传感器的三维运动捕获 数据较好地保持了运动细节,并真实地记录了运动 轨迹,数据精度高,并且相比于人体深度数据,采用 骨骼数据能够更加紧凑和鲜明地反应人体姿态。 对 于人体动作姿态识别,常用的方法有动态时间规整 (dynamic time warping, DTW)、动态贝叶斯(dynam⁃ ic Bayesian, DBN)、隐马尔科夫模型(hidden Markov models, HMM)、神经网络等。 如 A. Veeraraghavan 等[5]使用 DTW 方法匹配动作序列,Luo [6] 采用动态 贝叶斯网络进行人体动作姿态识别研究,并与 HMM 方法进行了比较,F. Buccolieri [7] 通过径向基神经网 络(radial⁃basis function, RBF)分析人体轮廓特征来 识别姿态。 相比上述方法,基于支持向量机的学习算法利 用结构风险最小化代替传统模式识别中的经验风险 最小化,对解决高维数、非线性和小样本的问题很有 优势。 鉴于此,本文提出了一种多类支持向量机人 体动作姿态识别方法。 该方法运用 Kinect 骨骼追 踪技术提取人体骨骼模型,并针对人体关节的特点 在关节点处建立球坐标系,利用关节角对人体动作 姿态进行描述。 同时,利用高斯核模型设计了基于 测地线距离的姿态核函数,采用二叉树设计多类支 持向量机算法对人体姿态进行识别。 1 人体姿态表示 1.1 Kinect 简介 Kinect 传感器是微软公司开发的一种 3D 体感 摄像机,它由 1 个红外投影仪、2 个摄像头组成,如 图 1(a)所示。 Kinect 工作原理的核心是通过类似 结构光法的光编码(light coding)技术的方式来获取 深度图像。 红外发射器连续地向空间发射光,并给 空间编码,通过普通 CMOS 合成黑白深度图像,其中 纯黑代表无穷远,纯白代表无穷近。 由于不需要特 制的感光芯片,极大地降低了成本,越来越多的学者 采用它进行深度图像的采集。 本文利用分割技术将 人体从深度图像背景环境中区分出来,并采用随机 森林[8]等分类算法将人体各个部位进行区分定位, 得出骨骼关节点的坐标信息。 每一帧的骨骼图像中 都有被跟踪人的姿势,包括 20 个关节点,并以 30 帧/ s 的速度生成骨骼图像流,实时地重现人体的运 动状态,骨骼提取流程如图 1(b)所示。 图 1 当 Kinect 外观和工作机理 Fig. 1 The appearance of the Kinect and the mechanism 1.2 人体姿态建模和行为描述 Kinect 传感器获取的景深图像中可以提取出人 体 20 个关键点的位置信息,本文选取其中的 16 个 骨骼点构成人体的骨架模型,每一个关节点的位置 用 Kinect 坐 标 系 下 的 三 维 向 量 表 示 Pi = xi,yi,zi ( ) T , 其中 xi , yi 代表在彩色图像上位置, zi 表示关节点离传感器的距离。 如图 2 所示,16 个骨 骼点中 P1 , P2 , … , P7 分别为人体的右侧肩、颈部、 左侧肩、脊柱、髋骨中心、右髋、左髋,共同构成人体 的躯干部分; P8 为人体头部; P9 , P10 ,…, P16 代表 人体的四肢部分,包括左右侧肘关节、腕关节、膝关 节和踝关节。 在绘制骨架图时,保证了骨架的大小 不会因人到传感器位置或者身体的整体平移而发生 改变,以达到更好的人机交互效果。 第 3 期 林海波,等:改进高斯核函数的人体姿态分析与识别 ·437·