正在加载图片...
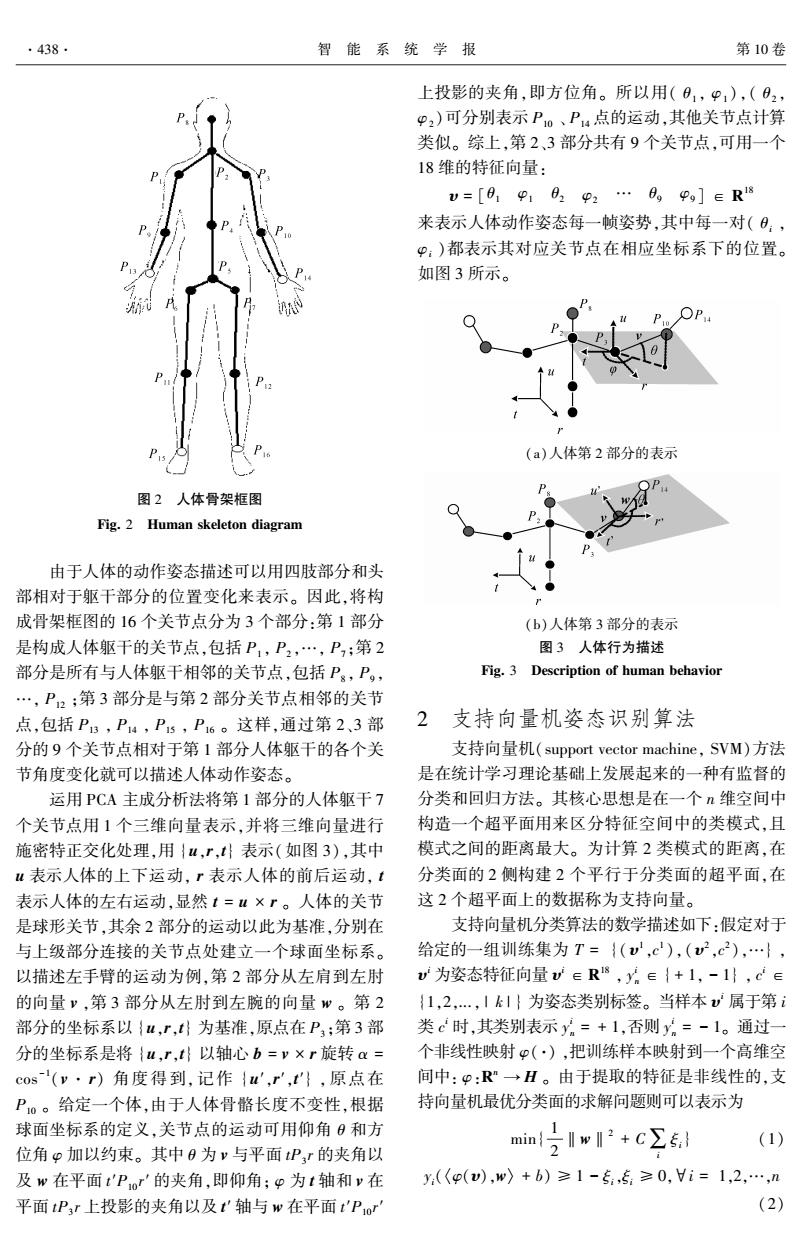
·438. 智能系统学报 第10卷 上投影的夹角,即方位角。所以用(01,P1),(02, P,)可分别表示P。、P4点的运动,其他关节点计算 类似。综上,第2、3部分共有9个关节点,可用一个 18维的特征向量: v=[99102p2…8,Pg]∈R8 来表示人体动作姿态每一帧姿势,其中每一对(日:, P:)都表示其对应关节点在相应坐标系下的位置。 如图3所示。 (a)人体第2部分的表示 图2人体骨架框图 Fig.2 Human skeleton diagram 由于人体的动作姿态描述可以用四肢部分和头 部相对于躯干部分的位置变化来表示。因此,将构 成骨架框图的16个关节点分为3个部分:第1部分 (b)人体第3部分的表示 是构成人体躯干的关节点,包括P1,P2,…,P;第2 图3人体行为描述 部分是所有与人体躯干相邻的关节点,包括P,P, Fig.3 Description of human behavior …,P2;第3部分是与第2部分关节点相邻的关节 点,包括PB,P4,P5,P16。这样,通过第2、3部 2 支持向量机姿态识别算法 分的9个关节点相对于第1部分人体躯干的各个关 支持向量机(support vector machine,SVM)方法 节角度变化就可以描述人体动作姿态。 是在统计学习理论基础上发展起来的一种有监督的 运用PCA主成分析法将第1部分的人体躯干7 分类和回归方法。其核心思想是在一个n维空间中 个关节点用1个三维向量表示,并将三维向量进行 构造一个超平面用来区分特征空间中的类模式,且 施密特正交化处理,用{u,r,t表示(如图3),其中 模式之间的距离最大。为计算2类模式的距离,在 表示人体的上下运动,r表示人体的前后运动,t 分类面的2侧构建2个平行于分类面的超平面,在 表示人体的左右运动,显然t=×r。人体的关节 这2个超平面上的数据称为支持向量。 是球形关节,其余2部分的运动以此为基准,分别在 支持向量机分类算法的数学描述如下:假定对于 与上级部分连接的关节点处建立一个球面坐标系。 给定的一组训练集为T={(v,c),(v2,c2),…}, 以描述左手臂的运动为例,第2部分从左肩到左肘 v为姿态特征向量U∈R8,y∈{+1,-1},c∈ 的向量y,第3部分从左肘到左腕的向量w。第2 {1,2,.,1k1}为姿态类别标签。当样本v属于第i 部分的坐标系以{“,r,t}为基准,原点在P:第3部 类c时,其类别表示y=+1,否则y=-1。通过一 分的坐标系是将{u,r,t以轴心b=v×r旋转a= 个非线性映射(·),把训练样本映射到一个高维空 cos(y·r)角度得到,记作{',r',},原点在 间中:P:R"→H。由于提取的特征是非线性的,支 P。。给定一个体,由于人体骨骼长度不变性,根据 持向量机最优分类面的求解问题则可以表示为 球面坐标系的定义,关节点的运动可用仰角日和方 (1) 位角p加以约束。其中0为v与平面P,r的夹角以 min片Iw2+c∑ 及w在平面t'Po'的夹角,即仰角;p为t轴和v在 y((p(v),w)+b)≥1-5,5≥0,i=1,2,…,n 平面tP,r上投影的夹角以及t'轴与w在平面t'Por' (2)图 2 人体骨架框图 Fig. 2 Human skeleton diagram 由于人体的动作姿态描述可以用四肢部分和头 部相对于躯干部分的位置变化来表示。 因此,将构 成骨架框图的 16 个关节点分为 3 个部分:第 1 部分 是构成人体躯干的关节点,包括 P1 , P2 ,…, P7 ;第 2 部分是所有与人体躯干相邻的关节点,包括 P8 , P9 , …, P12 ;第 3 部分是与第 2 部分关节点相邻的关节 点,包括 P13 , P14 , P15 , P16 。 这样,通过第 2、3 部 分的 9 个关节点相对于第 1 部分人体躯干的各个关 节角度变化就可以描述人体动作姿态。 运用 PCA 主成分析法将第 1 部分的人体躯干 7 个关节点用 1 个三维向量表示,并将三维向量进行 施密特正交化处理,用 {u,r,t} 表示(如图 3),其中 u 表示人体的上下运动, r 表示人体的前后运动, t 表示人体的左右运动,显然 t = u × r 。 人体的关节 是球形关节,其余 2 部分的运动以此为基准,分别在 与上级部分连接的关节点处建立一个球面坐标系。 以描述左手臂的运动为例,第 2 部分从左肩到左肘 的向量 v ,第 3 部分从左肘到左腕的向量 w 。 第 2 部分的坐标系以 {u,r,t} 为基准,原点在 P3 ;第 3 部 分的坐标系是将 {u,r,t} 以轴心 b = v × r 旋转 α = cos -1 (v· r) 角度得到, 记作 {u′,r′,t′} , 原点在 P10 。 给定一个体,由于人体骨骼长度不变性,根据 球面坐标系的定义,关节点的运动可用仰角 θ 和方 位角 φ 加以约束。 其中 θ 为 v 与平面 tP3 r 的夹角以 及 w 在平面 t′P10 r′ 的夹角,即仰角; φ 为 t 轴和 v 在 平面 tP3 r 上投影的夹角以及 t′ 轴与 w 在平面 t′P10 r′ 上投影的夹角,即方位角。 所以用( θ 1 , φ1 ),( θ 2 , φ2 )可分别表示 P10 、 P14 点的运动,其他关节点计算 类似。 综上,第 2、3 部分共有 9 个关节点,可用一个 18 维的特征向量: υ = [θ1 φ1 θ2 φ2 … θ9 φ9 ] ∈ R 18 来表示人体动作姿态每一帧姿势,其中每一对( θi , φi )都表示其对应关节点在相应坐标系下的位置。 如图 3 所示。 (a)人体第 2 部分的表示 (b)人体第 3 部分的表示 图 3 人体行为描述 Fig. 3 Description of human behavior 2 支持向量机姿态识别算法 支持向量机(support vector machine, SVM)方法 是在统计学习理论基础上发展起来的一种有监督的 分类和回归方法。 其核心思想是在一个 n 维空间中 构造一个超平面用来区分特征空间中的类模式,且 模式之间的距离最大。 为计算 2 类模式的距离,在 分类面的 2 侧构建 2 个平行于分类面的超平面,在 这 2 个超平面上的数据称为支持向量。 支持向量机分类算法的数学描述如下:假定对于 给定的一组训练集为 T = {(υ 1 ,c 1 ),(υ 2 ,c 2 ),…} , υ i 为姿态特征向量 υ i ∈ R 18 , y i n ∈ { + 1, - 1} , c i ∈ {1,2,..., | k | } 为姿态类别标签。 当样本 υ i 属于第 i 类 c i 时,其类别表示 y i n = + 1,否则 y i n = - 1。 通过一 个非线性映射 φ(·) ,把训练样本映射到一个高维空 间中: φ:R n → H 。 由于提取的特征是非线性的,支 持向量机最优分类面的求解问题则可以表示为 min{ 1 2 ‖w‖2 + C∑i ξi} (1) yi(〈φ(υ),w〉 + b) ≥ 1 - ξi,ξi ≥ 0,∀i = 1,2,…,n (2) ·438· 智 能 系 统 学 报 第 10 卷