正在加载图片...
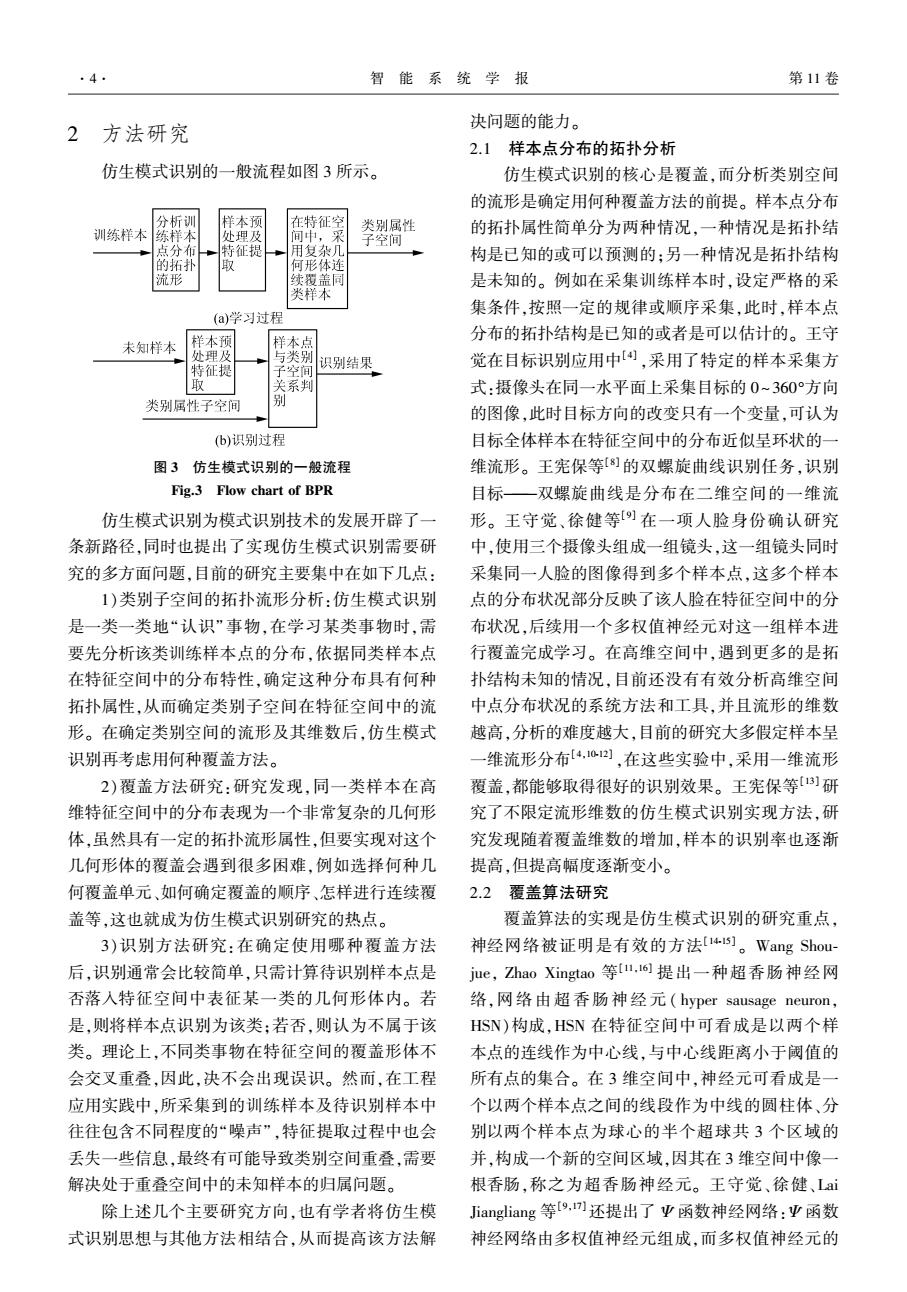
智能系统学报 第11卷 2 方法研究 决问题的能力。 2.1样本点分布的拓扑分析 仿生模式识别的一般流程如图3所示。 仿生模式识别的核心是覆盖,而分析类别空间 的流形是确定用何种覆盖方法的前提。样本点分布 分析训 样本预 在特征空 类别属性 训练样本 练样本 处理及 的拓扑属性简单分为两种情况,一种情况是拓扑结 间中,采 子空间 点分布 特征提 用复杂几 构是已知的或可以预测的:另一种情况是拓扑结构 的拓扑 取 何形体连 流形 续覆盖同 是未知的。例如在采集训练样本时,设定严格的采 类样本 集条件,按照一定的规律或顺序采集,此时,样本点 (a)学习过程 分布的拓扑结构是已知的或者是可以估计的。王守 未知样本 样本预 样本点 处理及 与类别 特征提 识别结果 觉在目标识别应用中[,采用了特定的样本采集方 取 式:摄像头在同一水平面上采集目标的0~360°方向 类别属性子空间 的图像,此时目标方向的改变只有一个变量,可认为 (b)识别过程 目标全体样本在特征空间中的分布近似呈环状的一 图3仿生模式识别的一般流程 维流形。王宪保等)的双螺旋曲线识别任务,识别 Fig.3 Flow chart of BPR 目标—双螺旋曲线是分布在二维空间的一维流 仿生模式识别为模式识别技术的发展开辟了一 形。王守觉、徐健等在一项人脸身份确认研究 条新路径,同时也提出了实现仿生模式识别需要研 中,使用三个摄像头组成一组镜头,这一组镜头同时 究的多方面问题,目前的研究主要集中在如下几,点: 采集同一人脸的图像得到多个样本点,这多个样本 1)类别子空间的拓扑流形分析:仿生模式识别 点的分布状况部分反映了该人脸在特征空间中的分 是一类一类地“认识”事物,在学习某类事物时,需 布状况,后续用一个多权值神经元对这一组样本进 要先分析该类训练样本点的分布,依据同类样本点 行覆盖完成学习。在高维空间中,遇到更多的是拓 在特征空间中的分布特性,确定这种分布具有何种 扑结构未知的情况,目前还没有有效分析高维空间 拓扑属性,从而确定类别子空间在特征空间中的流 中点分布状况的系统方法和工具,并且流形的维数 形。在确定类别空间的流形及其维数后,仿生模式 越高,分析的难度越大,目前的研究大多假定样本呈 识别再考虑用何种覆盖方法。 一维流形分布4,四),在这些实验中,采用一维流形 2)覆盖方法研究:研究发现,同一类样本在高 覆盖,都能够取得很好的识别效果。王宪保等1]研 维特征空间中的分布表现为一个非常复杂的几何形 究了不限定流形维数的仿生模式识别实现方法,研 体,虽然具有一定的拓扑流形属性,但要实现对这个 究发现随着覆盖维数的增加,样本的识别率也逐渐 几何形体的覆盖会遇到很多困难,例如选择何种几 提高,但提高幅度逐渐变小。 何覆盖单元、如何确定覆盖的顺序、怎样进行连续覆 2.2覆盖算法研究 盖等,这也就成为仿生模式识别研究的热点。 覆盖算法的实现是仿生模式识别的研究重点, 3)识别方法研究:在确定使用哪种覆盖方法 神经网络被证明是有效的方法[.)。Wang Shou- 后,识别通常会比较简单,只需计算待识别样本点是 jue,Zhao Xingtao等1.l6提出一种超香肠神经网 否落入特征空间中表征某一类的几何形体内。若 络,网络由超香肠神经元(hyper sausage neuron, 是,则将样本点识别为该类:若否,则认为不属于该 HSN)构成,HSN在特征空间中可看成是以两个样 类。理论上,不同类事物在特征空间的覆盖形体不 本点的连线作为中心线,与中心线距离小于阈值的 会交叉重叠,因此,决不会出现误识。然而,在工程 所有点的集合。在3维空间中,神经元可看成是一 应用实践中,所采集到的训练样本及待识别样本中 个以两个样本点之间的线段作为中线的圆柱体、分 往往包含不同程度的“噪声”,特征提取过程中也会 别以两个样本点为球心的半个超球共3个区域的 丢失一些信息,最终有可能导致类别空间重叠,需要 并,构成一个新的空间区域,因其在3维空间中像一 解决处于重叠空间中的未知样本的归属问题。 根香肠,称之为超香肠神经元。王守觉、徐健、Lai 除上述几个主要研究方向,也有学者将仿生模 Jiangliang等9,川还提出了业函数神经网络:业函数 式识别思想与其他方法相结合,从而提高该方法解 神经网络由多权值神经元组成,而多权值神经元的2 方法研究 仿生模式识别的一般流程如图 3 所示。 图 3 仿生模式识别的一般流程 Fig.3 Flow chart of BPR 仿生模式识别为模式识别技术的发展开辟了一 条新路径,同时也提出了实现仿生模式识别需要研 究的多方面问题,目前的研究主要集中在如下几点: 1)类别子空间的拓扑流形分析:仿生模式识别 是一类一类地“认识”事物,在学习某类事物时,需 要先分析该类训练样本点的分布,依据同类样本点 在特征空间中的分布特性,确定这种分布具有何种 拓扑属性,从而确定类别子空间在特征空间中的流 形。 在确定类别空间的流形及其维数后,仿生模式 识别再考虑用何种覆盖方法。 2)覆盖方法研究:研究发现,同一类样本在高 维特征空间中的分布表现为一个非常复杂的几何形 体,虽然具有一定的拓扑流形属性,但要实现对这个 几何形体的覆盖会遇到很多困难,例如选择何种几 何覆盖单元、如何确定覆盖的顺序、怎样进行连续覆 盖等,这也就成为仿生模式识别研究的热点。 3)识别方法研究:在确定使用哪种覆盖方法 后,识别通常会比较简单,只需计算待识别样本点是 否落入特征空间中表征某一类的几何形体内。 若 是,则将样本点识别为该类;若否,则认为不属于该 类。 理论上,不同类事物在特征空间的覆盖形体不 会交叉重叠,因此,决不会出现误识。 然而,在工程 应用实践中,所采集到的训练样本及待识别样本中 往往包含不同程度的“噪声”,特征提取过程中也会 丢失一些信息,最终有可能导致类别空间重叠,需要 解决处于重叠空间中的未知样本的归属问题。 除上述几个主要研究方向,也有学者将仿生模 式识别思想与其他方法相结合,从而提高该方法解 决问题的能力。 2.1 样本点分布的拓扑分析 仿生模式识别的核心是覆盖,而分析类别空间 的流形是确定用何种覆盖方法的前提。 样本点分布 的拓扑属性简单分为两种情况,一种情况是拓扑结 构是已知的或可以预测的;另一种情况是拓扑结构 是未知的。 例如在采集训练样本时,设定严格的采 集条件,按照一定的规律或顺序采集,此时,样本点 分布的拓扑结构是已知的或者是可以估计的。 王守 觉在目标识别应用中[4] ,采用了特定的样本采集方 式:摄像头在同一水平面上采集目标的 0~360°方向 的图像,此时目标方向的改变只有一个变量,可认为 目标全体样本在特征空间中的分布近似呈环状的一 维流形。 王宪保等[8]的双螺旋曲线识别任务,识别 目标———双螺旋曲线是分布在二维空间的一维流 形。 王守觉、徐健等[9] 在一项人脸身份确认研究 中,使用三个摄像头组成一组镜头,这一组镜头同时 采集同一人脸的图像得到多个样本点,这多个样本 点的分布状况部分反映了该人脸在特征空间中的分 布状况,后续用一个多权值神经元对这一组样本进 行覆盖完成学习。 在高维空间中,遇到更多的是拓 扑结构未知的情况,目前还没有有效分析高维空间 中点分布状况的系统方法和工具,并且流形的维数 越高,分析的难度越大,目前的研究大多假定样本呈 一维流形分布[4,10⁃12] ,在这些实验中,采用一维流形 覆盖,都能够取得很好的识别效果。 王宪保等[13] 研 究了不限定流形维数的仿生模式识别实现方法,研 究发现随着覆盖维数的增加,样本的识别率也逐渐 提高,但提高幅度逐渐变小。 2.2 覆盖算法研究 覆盖算法的实现是仿生模式识别的研究重点, 神经网络被证明是有效的方法[14⁃15] 。 Wang Shou⁃ jue, Zhao Xingtao 等[11,16] 提出一种超香肠神经网 络,网络由超香肠神经元 ( hyper sausage neuron, HSN)构成,HSN 在特征空间中可看成是以两个样 本点的连线作为中心线,与中心线距离小于阈值的 所有点的集合。 在 3 维空间中,神经元可看成是一 个以两个样本点之间的线段作为中线的圆柱体、分 别以两个样本点为球心的半个超球共 3 个区域的 并,构成一个新的空间区域,因其在 3 维空间中像一 根香肠,称之为超香肠神经元。 王守觉、徐健、Lai Jiangliang 等[9,17]还提出了 Ψ 函数神经网络:Ψ 函数 神经网络由多权值神经元组成,而多权值神经元的 ·4· 智 能 系 统 学 报 第 11 卷