正在加载图片...
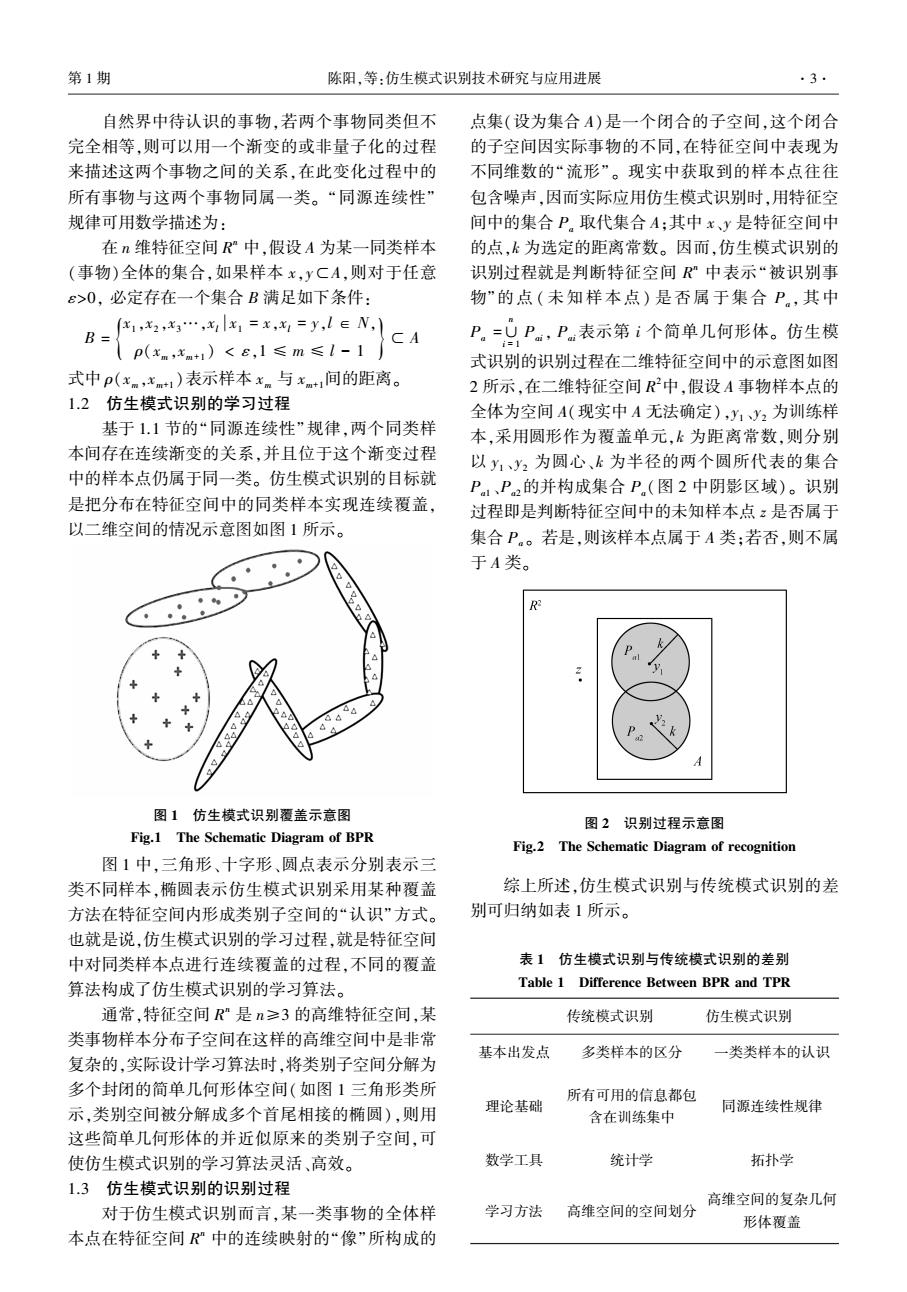
第1期 陈阳,等:仿生模式识别技术研究与应用进展 3 自然界中待认识的事物,若两个事物同类但不 点集(设为集合A)是一个闭合的子空间,这个闭合 完全相等,则可以用一个渐变的或非量子化的过程 的子空间因实际事物的不同,在特征空间中表现为 来描述这两个事物之间的关系,在此变化过程中的 不同维数的“流形”。现实中获取到的样本点往往 所有事物与这两个事物同属一类。“同源连续性” 包含噪声,因而实际应用仿生模式识别时,用特征空 规律可用数学描述为: 间中的集合P。取代集合A;其中x、y是特征空间中 在n维特征空间R”中,假设A为某一同类样本 的点,k为选定的距离常数。因而,仿生模式识别的 (事物)全体的集合,如果样本x,yCA,则对于任意 识别过程就是判断特征空间R”中表示“被识别事 E>0,必定存在一个集合B满足如下条件: 物”的点(未知样本点)是否属于集合P。,其中 x,x2,3x=x,x=y,lE N,) B= CA (p(xm,xm+1)<e,1≤m≤l-1 P.出P,P表示第i个简单几何形体。仿生模 式识别的识别过程在二维特征空间中的示意图如图 式中p(x。,x1)表示样本x.与x1间的距离。 2所示,在二维特征空间R中,假设A事物样本点的 1.2仿生模式识别的学习过程 全体为空间A(现实中A无法确定),少12为训练样 基于1.1节的“同源连续性”规律,两个同类样 本,采用圆形作为覆盖单元,k为距离常数,则分别 本间存在连续渐变的关系,并且位于这个渐变过程 以y1y2为圆心、k为半径的两个圆所代表的集合 中的样本点仍属于同一类。仿生模式识别的目标就 P1、P2的并构成集合P.(图2中阴影区域)。识别 是把分布在特征空间中的同类样本实现连续覆盖, 过程即是判断特征空间中的未知样本点:是否属于 以二维空间的情况示意图如图1所示。 集合P。若是,则该样本点属于A类;若否,则不属 于A类。 图1仿生模式识别覆盖示意图 图2识别过程示意图 Fig.1 The Schematic Diagram of BPR Fig.2 The Schematic Diagram of recognition 图1中,三角形、十字形、圆点表示分别表示三 类不同样本,椭圆表示仿生模式识别采用某种覆盖 综上所述,仿生模式识别与传统模式识别的差 方法在特征空间内形成类别子空间的“认识”方式。 别可归纳如表1所示。 也就是说,仿生模式识别的学习过程,就是特征空间 中对同类样本点进行连续覆盖的过程,不同的覆盖 表1仿生模式识别与传统模式识别的差别 算法构成了仿生模式识别的学习算法。 Table 1 Difference Between BPR and TPR 通常,特征空间R”是n≥3的高维特征空间,某 传统模式识别 仿生模式识别 类事物样本分布子空间在这样的高维空间中是非常 基本出发点 多类样本的区分 一类类样本的认识 复杂的,实际设计学习算法时,将类别子空间分解为 多个封闭的简单几何形体空间(如图1三角形类所 所有可用的信息都包 示,类别空间被分解成多个首尾相接的椭圆),则用 理论基础 同源连续性规律 含在训练集中 这些简单几何形体的并近似原来的类别子空间,可 使仿生模式识别的学习算法灵活、高效。 数学工具 统计学 拓扑学 1.3仿生模式识别的识别过程 高维空间的复杂几何 对于仿生模式识别而言,某一类事物的全体样 学习方法 高维空间的空间划分 形体覆盖 本点在特征空间中的连续映射的“像”所构成的自然界中待认识的事物,若两个事物同类但不 完全相等,则可以用一个渐变的或非量子化的过程 来描述这两个事物之间的关系,在此变化过程中的 所有事物与这两个事物同属一类。 “同源连续性” 规律可用数学描述为: 在 n 维特征空间 R n 中,假设 A 为某一同类样本 (事物)全体的集合,如果样本 x,y⊂A,则对于任意 ε>0, 必定存在一个集合 B 满足如下条件: B = x1 ,x2 ,x3…,xl x1 = x,xl = y,l ∈ N, ρ(xm ,x { m+1 ) < ε,1 ≤ m ≤ l - 1 } ⊂ A 式中 ρ(xm ,xm+1 )表示样本 xm 与 xm+1间的距离。 1.2 仿生模式识别的学习过程 基于 1.1 节的“同源连续性”规律,两个同类样 本间存在连续渐变的关系,并且位于这个渐变过程 中的样本点仍属于同一类。 仿生模式识别的目标就 是把分布在特征空间中的同类样本实现连续覆盖, 以二维空间的情况示意图如图 1 所示。 图 1 仿生模式识别覆盖示意图 Fig.1 The Schematic Diagram of BPR 图 1 中,三角形、十字形、圆点表示分别表示三 类不同样本,椭圆表示仿生模式识别采用某种覆盖 方法在特征空间内形成类别子空间的“认识”方式。 也就是说,仿生模式识别的学习过程,就是特征空间 中对同类样本点进行连续覆盖的过程,不同的覆盖 算法构成了仿生模式识别的学习算法。 通常,特征空间 R n 是 n≥3 的高维特征空间,某 类事物样本分布子空间在这样的高维空间中是非常 复杂的,实际设计学习算法时,将类别子空间分解为 多个封闭的简单几何形体空间(如图 1 三角形类所 示,类别空间被分解成多个首尾相接的椭圆),则用 这些简单几何形体的并近似原来的类别子空间,可 使仿生模式识别的学习算法灵活、高效。 1.3 仿生模式识别的识别过程 对于仿生模式识别而言,某一类事物的全体样 本点在特征空间 R n 中的连续映射的“像”所构成的 点集(设为集合 A)是一个闭合的子空间,这个闭合 的子空间因实际事物的不同,在特征空间中表现为 不同维数的“流形”。 现实中获取到的样本点往往 包含噪声,因而实际应用仿生模式识别时,用特征空 间中的集合 Pa 取代集合 A;其中 x、y 是特征空间中 的点,k 为选定的距离常数。 因而,仿生模式识别的 识别过程就是判断特征空间 R n 中表示“被识别事 物”的点 ( 未知样本点) 是否属于集合 Pa , 其中 Pa =∪ n i = 1 Pai, Pai 表示第 i 个简单几何形体。 仿生模 式识别的识别过程在二维特征空间中的示意图如图 2 所示,在二维特征空间 R 2中,假设 A 事物样本点的 全体为空间 A(现实中 A 无法确定),y1 、y2 为训练样 本,采用圆形作为覆盖单元,k 为距离常数,则分别 以 y1 、y2 为圆心、k 为半径的两个圆所代表的集合 Pa1 、Pa2的并构成集合 Pa(图 2 中阴影区域)。 识别 过程即是判断特征空间中的未知样本点 z 是否属于 集合 Pa 。 若是,则该样本点属于 A 类;若否,则不属 于 A 类。 图 2 识别过程示意图 Fig.2 The Schematic Diagram of recognition 综上所述,仿生模式识别与传统模式识别的差 别可归纳如表 1 所示。 表 1 仿生模式识别与传统模式识别的差别 Table 1 Difference Between BPR and TPR 传统模式识别 仿生模式识别 基本出发点 多类样本的区分 一类类样本的认识 理论基础 所有可用的信息都包 含在训练集中 同源连续性规律 数学工具 统计学 拓扑学 学习方法 高维空间的空间划分 高维空间的复杂几何 形体覆盖 第 1 期 陈阳,等:仿生模式识别技术研究与应用进展 ·3·