正在加载图片...
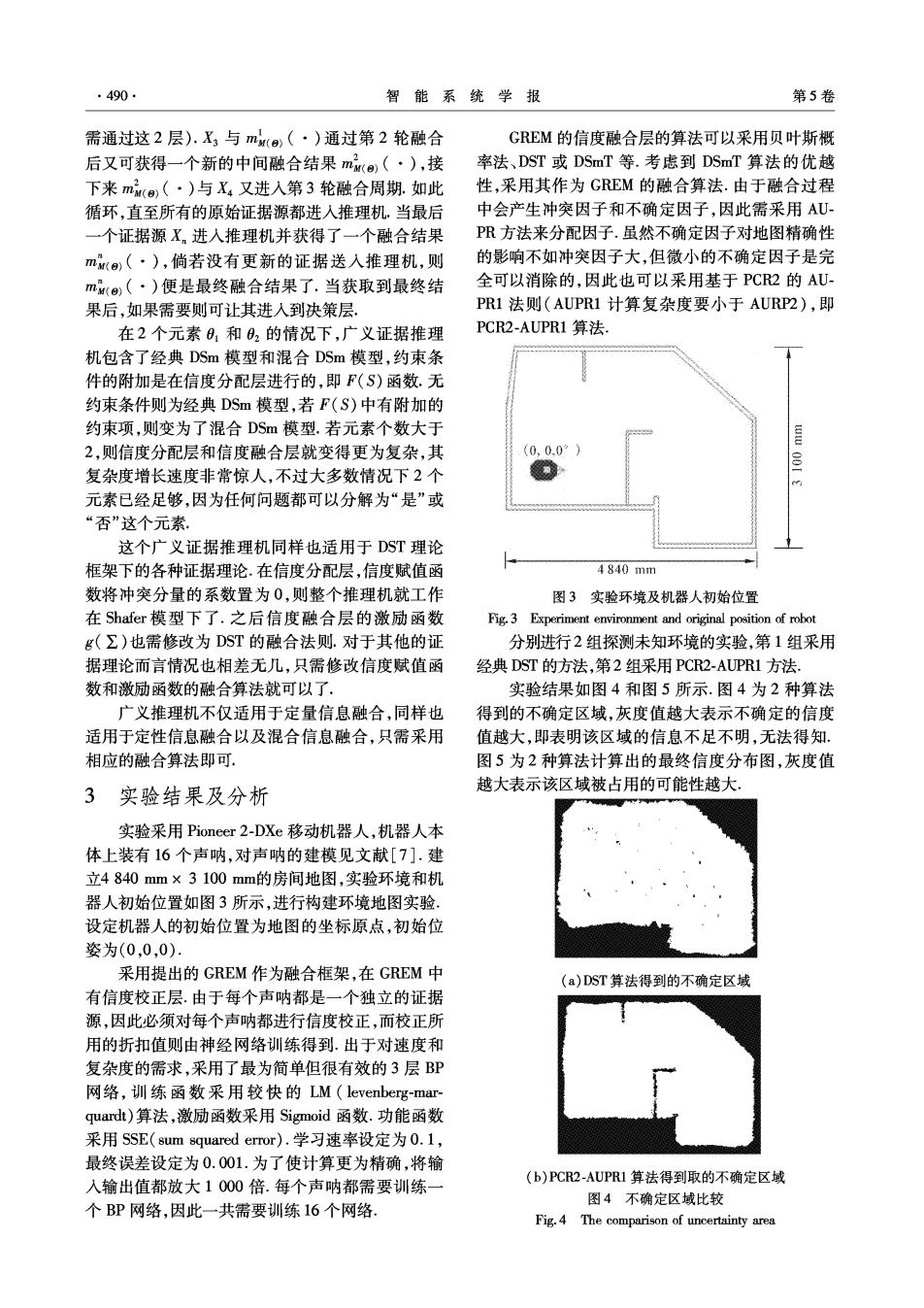
·490· 智能系统学报 第5卷 需通过这2层).X3与mw(e)(·)通过第2轮融合 GREM的信度融合层的算法可以采用贝叶斯概 后又可获得一个新的中间融合结果mM)(·),接 率法、DST或DSmT等.考虑到DSmT算法的优越 下来mM()(·)与X4又进入第3轮融合周期.如此 性,采用其作为GEM的融合算法.由于融合过程 循环,直至所有的原始证据源都进入推理机.当最后 中会产生冲突因子和不确定因子,因此需采用AU 一个证据源X,进入推理机并获得了一个融合结果 PR方法来分配因子.虽然不确定因子对地图精确性 mM(9)(·),倘若没有更新的证据送入推理机,则 的影响不如冲突因子大,但微小的不确定因子是完 mM(e)(·)便是最终融合结果了.当获取到最终结 全可以消除的,因此也可以采用基于PCR2的AU- 果后,如果需要则可让其进入到决策层 PR1法则(AUPR1计算复杂度要小于AURP2),即 在2个元素01和02的情况下,广义证据推理 PCR2-AUPR1算法, 机包含了经典DSm模型和混合DSm模型,约束条 件的附加是在信度分配层进行的,即F(S)函数.无 约束条件则为经典DSm模型,若F(S)中有附加的 约束项,则变为了混合DSm模型,若元素个数大于 2,则信度分配层和信度融合层就变得更为复杂,其 (0,0.0°)】 复杂度增长速度非常惊人,不过大多数情况下2个 000 元素已经足够,因为任何问题都可以分解为“是”或 “否”这个元素 这个广义证据推理机同样也适用于DST理论 框架下的各种证据理论.在信度分配层,信度赋值函 4840mm 数将冲突分量的系数置为0,则整个推理机就工作 图3实验环境及机器人初始位置 在Shafer模型下了.之后信度融合层的激励函数 Fig.3 Experiment environment and original position of robot g(Σ)也需修改为DST的融合法则.对于其他的证 分别进行2组探测未知环境的实验,第1组采用 据理论而言情况也相差无几,只需修改信度赋值函 经典DST的方法,第2组采用PCR2-AUPR1方法 数和激励函数的融合算法就可以了. 实验结果如图4和图5所示.图4为2种算法 广义推理机不仅适用于定量信息融合,同样也 得到的不确定区域,灰度值越大表示不确定的信度 适用于定性信息融合以及混合信息融合,只需采用 值越大,即表明该区域的信息不足不明,无法得知. 相应的融合算法即可, 图5为2种算法计算出的最终信度分布图,灰度值 3实验结果及分析 越大表示该区域被占用的可能性越大, 实验采用Pioneer2-DXe移动机器人,机器人本 体上装有16个声呐,对声呐的建模见文献[7].建 立4840mm×3100mm的房间地图,实验环境和机 器人初始位置如图3所示,进行构建环境地图实验。 设定机器人的初始位置为地图的坐标原点,初始位 姿为(0,0,0). 采用提出的GREM作为融合框架,在GREM中 (a)DST算法得到的不确定区域 有信度校正层.由于每个声呐都是一个独立的证据 源,因此必须对每个声呐都进行信度校正,而校正所 用的折扣值则由神经网络训练得到.出于对速度和 复杂度的需求,采用了最为简单但很有效的3层BP 网络,训练函数采用较快的LM(levenberg-mar quardt)算法,激励函数采用Sigmoid函数.功能函数 采用SSE(sum squared error).学习速率设定为0.1, 最终误差设定为0.001.为了使计算更为精确,将输 (b)PCR2-AUPR1算法得到取的不确定区域 入输出值都放大1000倍.每个声呐都需要训练一 图4不确定区域比较 个BP网络,因此一共需要训练16个网络 Fig.4 The comparison of uncertainty area