正在加载图片...
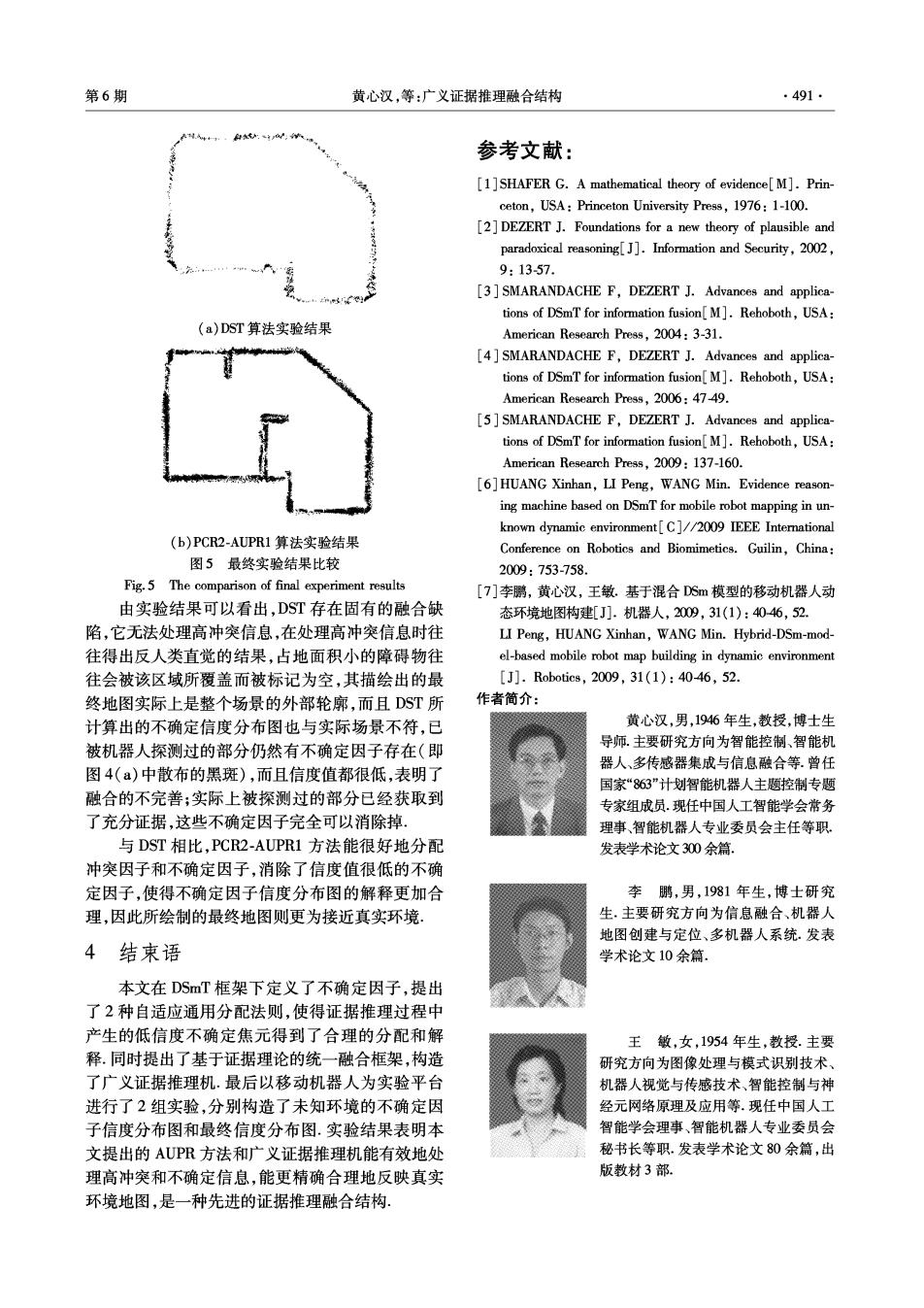
第6期 黄心汉,等:广义证据推理融合结构 491. 参考文献: [1]SHAFER G.A mathematical theory of evidence[M].Prin- ceton,USA:Princeton University Press,1976:1-100. [2]DEZERT J.Foundations for a new theory of plausible and paradoxical reasoning[J].Information and Security,2002, 9:1357 [3]SMARANDACHE F,DEZERT J.Advances and applica- tions of DSmT for information fusion[M].Rehoboth,USA: (a)DST算法实验结果 American Research Press,2004:3-31. [4]SMARANDACHE F,DEZERT J.Advances and applica- tions of DSmT for information fusion[M].Rehoboth.USA: American Research Press,2006:47-49. [5 SMARANDACHE F,DEZERT J.Advances and applica- tions of DSmT for information fusion[M].Rehoboth,USA: American Research Press,2009:137-160. [6]HUANG Xinhan,LI Peng,WANG Min.Evidence reason- ing machine based on DSmT for mobile robot mapping in un- known dynamic environment[C]//2009 IEEE Interational (b)PCR2-AUPR1算法实验结果 Conference on Robotics and Biomimetics.Guilin,China: 图5最终实验结果比较 2009:753-758. Fig.5 The comparison of final experiment results [7]李鹏,黄心汉,王敏.基于混合DSm模型的移动机器人动 由实验结果可以看出,DST存在固有的融合缺 态环境地图构建[J刀.机器人,2009,31(1):4046,52. 陷,它无法处理高冲突信息,在处理高冲突信息时往 LI Peng,HUANG Xinhan,WANG Min.Hybrid-DSm-mod- 往得出反人类直觉的结果,占地面积小的障碍物往 el-based mobile robot map building in dynamic environment 往会被该区域所覆盖而被标记为空,其描绘出的最 [J].Robotics,2009,31(1):40-46,52. 终地图实际上是整个场景的外部轮廓,而且DST所 作者简介: 计算出的不确定信度分布图也与实际场景不符,已 黄心汉,男,1946年生,教授,博士生 被机器人探测过的部分仍然有不确定因子存在(即 导师.主要研究方向为智能控制、智能机 器人、多传感器集成与信息融合等.曾任 图4(a)中散布的黑斑),而且信度值都很低,表明了 国家“863”计划智能机器人主题控制专题 融合的不完善;实际上被探测过的部分已经获取到 专家组成员.现任中国人工智能学会常务 了充分证据,这些不确定因子完全可以消除掉. 理事、智能机器人专业委员会主任等职 与DST相比,PCR2-AUPR1方法能很好地分配 发表学术论文300余篇. 冲突因子和不确定因子,消除了信度值很低的不确 定因子,使得不确定因子信度分布图的解释更加合 李鹏,男,1981年生,博士研究 理,因此所绘制的最终地图则更为接近真实环境. 生.主要研究方向为信息融合、机器人 地图创建与定位、多机器人系统.发表 4结束语 学术论文10余篇, 本文在DSmT框架下定义了不确定因子,提出 了2种自适应通用分配法则,使得证据推理过程中 产生的低信度不确定焦元得到了合理的分配和解 王敏,女,1954年生,教授.主要 释.同时提出了基于证据理论的统一融合框架,构造 研究方向为图像处理与模式识别技术、 了广义证据推理机.最后以移动机器人为实验平台 机器人视觉与传感技术、智能控制与神 进行了2组实验,分别构造了未知环境的不确定因 经元网络原理及应用等.现任中国人工 子信度分布图和最终信度分布图.实验结果表明本 智能学会理事、智能机器人专业委员会 文提出的AUPR方法和广义证据推理机能有效地处 秘书长等职.发表学术论文80余篇,出 理高冲突和不确定信息,能更精确合理地反映真实 版教材3部. 环境地图,是一种先进的证据推理融合结构