正在加载图片...
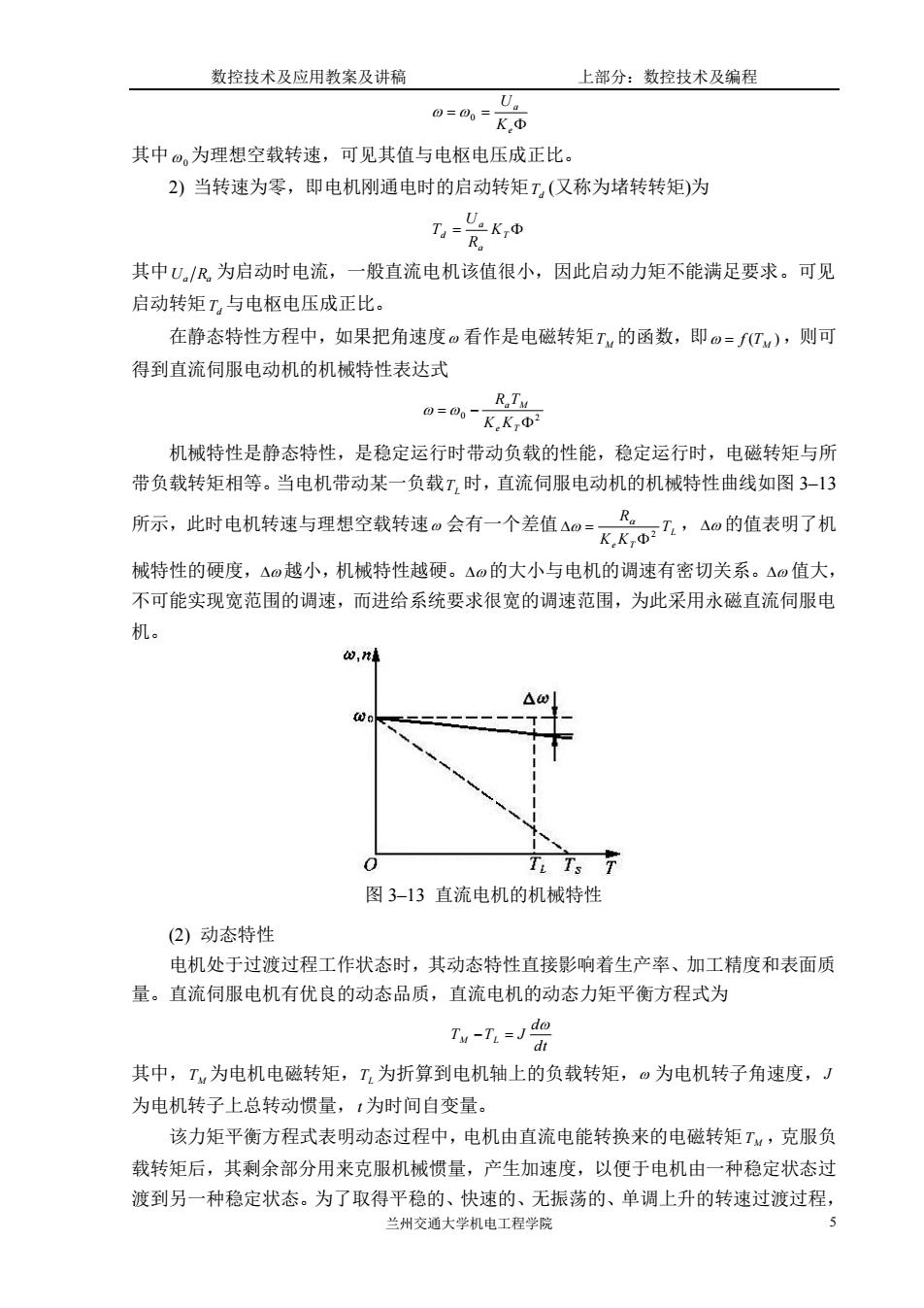
数控技术及应用教案及讲稿 上部分:数控技术及编程 0==K0 其中@。为理想空载转速,可见其值与电枢电压成正比。 2)当转速为零,即电机刚通电时的启动转矩T(又称为堵转转矩)为 其中U/R为启动时电流,一般直流电机该值很小,因此启动力矩不能满足要求。可见 启动转矩工,与电枢电压成正比。 在静态特性方程中,如果把角速度。看作是电磁转矩T,的函数,即。=fT),则可 得到直流伺服电动机的机械特性表达式 RT 0=0KK币 机械特性是静态特性,是稳定运行时带动负载的性能,稳定运行时,电磁转矩与所 带负载转矩相等。当电机带动某一负载工,时,直流伺服电动机的机械特性曲线如图3-13 自机转速与理想空载转速a会有一个差值A0=,”T,△。的f 械特性的硬度,△越小,机械特性越硬。△a的大小与电机的调速有密切关系。△值大, 不可能实现宽范围的调速,而进给系统要求很宽的调速范围,为此采用永磁直流伺服电 机。 的, 0 i TT 图3-13直流电机的机械特性 (2)动态特性 电机处于过渡过程工作状态时,其动态特性直接影响着生产率、加工精度和表面质 量。直流伺服电机有优良的动态品质,直流电机的动态力矩平衡方程式为 w-1= 其中,T,为电机电磁转矩,T,为折算到电机轴上的负载转矩,。为电机转子角速度,J 为电机转子上总转动惯量,·为时间自变量。 该力矩平衡方程式表明动态过程中,电机由直流电能转换来的电磁转矩1,克服负 载转矩后,其剩余部分用来克服机械惯量,产生加速度,以便于电机由一种稳定状态过 渡到另一种稳定状态。为了取得平稳的、快速的、无振荡的、单调上升的转速过渡过程, 兰州交通大学机电工程学院数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 5 = = e a K U 0 其中 0 为理想空载转速,可见其值与电枢电压成正比。 2) 当转速为零,即电机刚通电时的启动转矩 Td (又称为堵转转矩)为 = T a a d K R U T 其中 Ua Ra 为启动时电流,一般直流电机该值很小,因此启动力矩不能满足要求。可见 启动转矩 Td 与电枢电压成正比。 在静态特性方程中,如果把角速度 看作是电磁转矩 TM 的函数,即 = f (TM ) ,则可 得到直流伺服电动机的机械特性表达式 0 2 = − e T a M K K R T 机械特性是静态特性,是稳定运行时带动负载的性能,稳定运行时,电磁转矩与所 带负载转矩相等。当电机带动某一负载 TL 时,直流伺服电动机的机械特性曲线如图 3–13 所示,此时电机转速与理想空载转速 会有一个差值 L e T T K K R 2 = , 的值表明了机 械特性的硬度, 越小,机械特性越硬。 的大小与电机的调速有密切关系。 值大, 不可能实现宽范围的调速,而进给系统要求很宽的调速范围,为此采用永磁直流伺服电 机。 图 3–13 直流电机的机械特性 (2) 动态特性 电机处于过渡过程工作状态时,其动态特性直接影响着生产率、加工精度和表面质 量。直流伺服电机有优良的动态品质,直流电机的动态力矩平衡方程式为 dt d T T J M L − = 其中, TM 为电机电磁转矩, TL 为折算到电机轴上的负载转矩, 为电机转子角速度, J 为电机转子上总转动惯量, t 为时间自变量。 该力矩平衡方程式表明动态过程中,电机由直流电能转换来的电磁转矩 TM ,克服负 载转矩后,其剩余部分用来克服机械惯量,产生加速度,以便于电机由一种稳定状态过 渡到另一种稳定状态。为了取得平稳的、快速的、无振荡的、单调上升的转速过渡过程