正在加载图片...
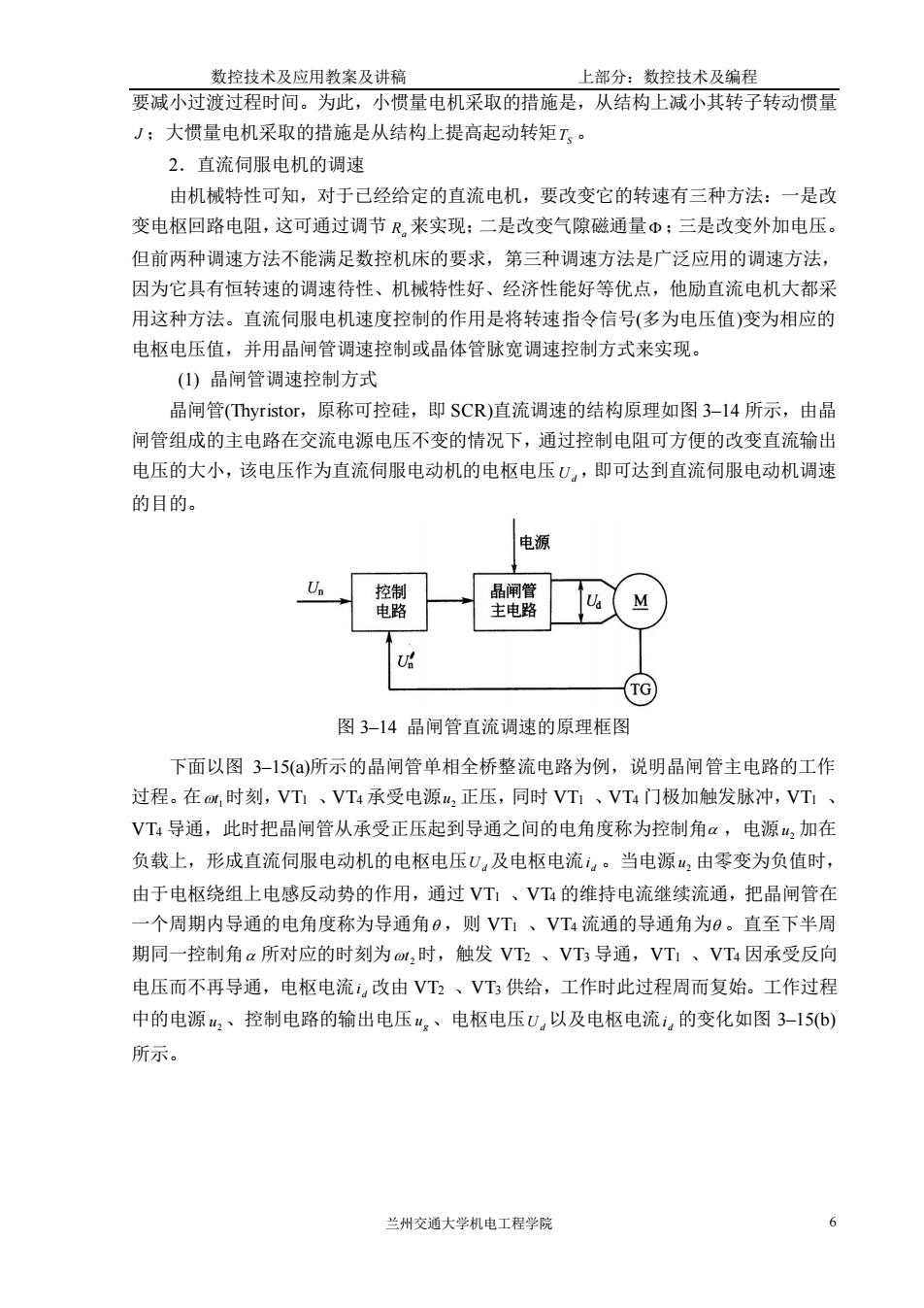
数控技术及应用教案及讲稿 上部分:数控技术及编程 要减小过渡过程时间。为此,小惯量电机采取的措施是,从结构上减小其转子转动惯量 J:大惯量电机采取的措施是从结构上提高起动转矩T,。 2.直流伺服电机的调速 由机械特性可知,对于己经给定的直流电机,要改变它的转速有三种方法:一是改 变电枢回路电阻,这可通过调节凡,来实现:二是改变气隙磁通量Φ:三是改变外加电压。 但前两种调速方法不能满足数控机床的要求,第三种调速方法是广泛应用的调速方法, 因为它具有恒转速的调速待性、机械特性好、经济性能好等优点,他励直流电机大都采 用这种方法。直流伺服电机速度控制的作用是将转速指令信号(多为电压值)变为相应的 电枢电压值,并用晶闸管调速控制或晶体管脉宽调速控制方式来实现。 ()晶闸管调速控制方式 晶闸管(Thyristor,原称可控硅,即SCR)直流调速的结构原理如图3-l4所示,由晶 闸管组成的主电路在交流电源电压不变的情况下,通过控制电阻可方便的改变直流输出 电压的大小,该电压作为直流伺服电动机的电枢电压U,即可达到直流伺服电动机调速 的目的。 电源 入 TG) 图3-14晶闸管直流调速的原理框图 下面以图3-15()所示的晶闸管单相全桥整流电路为例,说明晶闸管主电路的工作 过程。在w,时刻,VT、VT4承受电源,正压,同时VT、VT4门极加触发脉冲,VT、 VT导通,此时把晶闸管从承受正压起到导通之间的电角度称为控制角α,电源4,加在 负载上,形成直流伺服电动机的电枢电压U,及电枢电流,。当电源山,由零变为负值时 由于电枢绕组上电感反动势的作用,通过VT、VT的维持电流继续流通,把晶闸管在 一个周期内导通的电角度称为导通角,则VT、VT流通的导通角为9。直至下半周 期同一控制角a所对应的时刻为m,时,触发VT2、VT导通,VT、VT4因承受反向 电压而不再导通,电枢电流,改由VT、VT供给,工作时此过程周而复始。工作过程 中的电源4,、控制电路的输出电压M,、电枢电压U,以及电枢电流,的变化如图3-15b) 所示。 兰州交通大学机电工程学院 6 数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 6 要减小过渡过程时间。为此,小惯量电机采取的措施是,从结构上减小其转子转动惯量 J ;大惯量电机采取的措施是从结构上提高起动转矩 TS 。 2.直流伺服电机的调速 由机械特性可知,对于已经给定的直流电机,要改变它的转速有三种方法:一是改 变电枢回路电阻,这可通过调节 Ra 来实现;二是改变气隙磁通量 ;三是改变外加电压。 但前两种调速方法不能满足数控机床的要求,第三种调速方法是广泛应用的调速方法, 因为它具有恒转速的调速待性、机械特性好、经济性能好等优点,他励直流电机大都采 用这种方法。直流伺服电机速度控制的作用是将转速指令信号(多为电压值)变为相应的 电枢电压值,并用晶闸管调速控制或晶体管脉宽调速控制方式来实现。 (1) 晶闸管调速控制方式 晶闸管(Thyristor,原称可控硅,即 SCR)直流调速的结构原理如图 3–14 所示,由晶 闸管组成的主电路在交流电源电压不变的情况下,通过控制电阻可方便的改变直流输出 电压的大小,该电压作为直流伺服电动机的电枢电压 U d ,即可达到直流伺服电动机调速 的目的。 图 3–14 晶闸管直流调速的原理框图 下面以图 3–15(a)所示的晶闸管单相全桥整流电路为例,说明晶闸管主电路的工作 过程。在 1 t 时刻,VT1 、VT4 承受电源 u2 正压,同时 VT1 、VT4 门极加触发脉冲,VT1 、 VT4 导通,此时把晶闸管从承受正压起到导通之间的电角度称为控制角 ,电源 u2 加在 负载上,形成直流伺服电动机的电枢电压 U d 及电枢电流 d i 。当电源 u2 由零变为负值时, 由于电枢绕组上电感反动势的作用,通过 VT1 、VT4 的维持电流继续流通,把晶闸管在 一个周期内导通的电角度称为导通角 ,则 VT1 、VT4 流通的导通角为 。直至下半周 期同一控制角 所对应的时刻为 2 t 时,触发 VT2 、VT3 导通,VT1 、VT4 因承受反向 电压而不再导通,电枢电流 d i 改由 VT2 、VT3 供给,工作时此过程周而复始。工作过程 中的电源 u2 、控制电路的输出电压 g u 、电枢电压 U d 以及电枢电流 d i 的变化如图 3–15(b) 所示