正在加载图片...
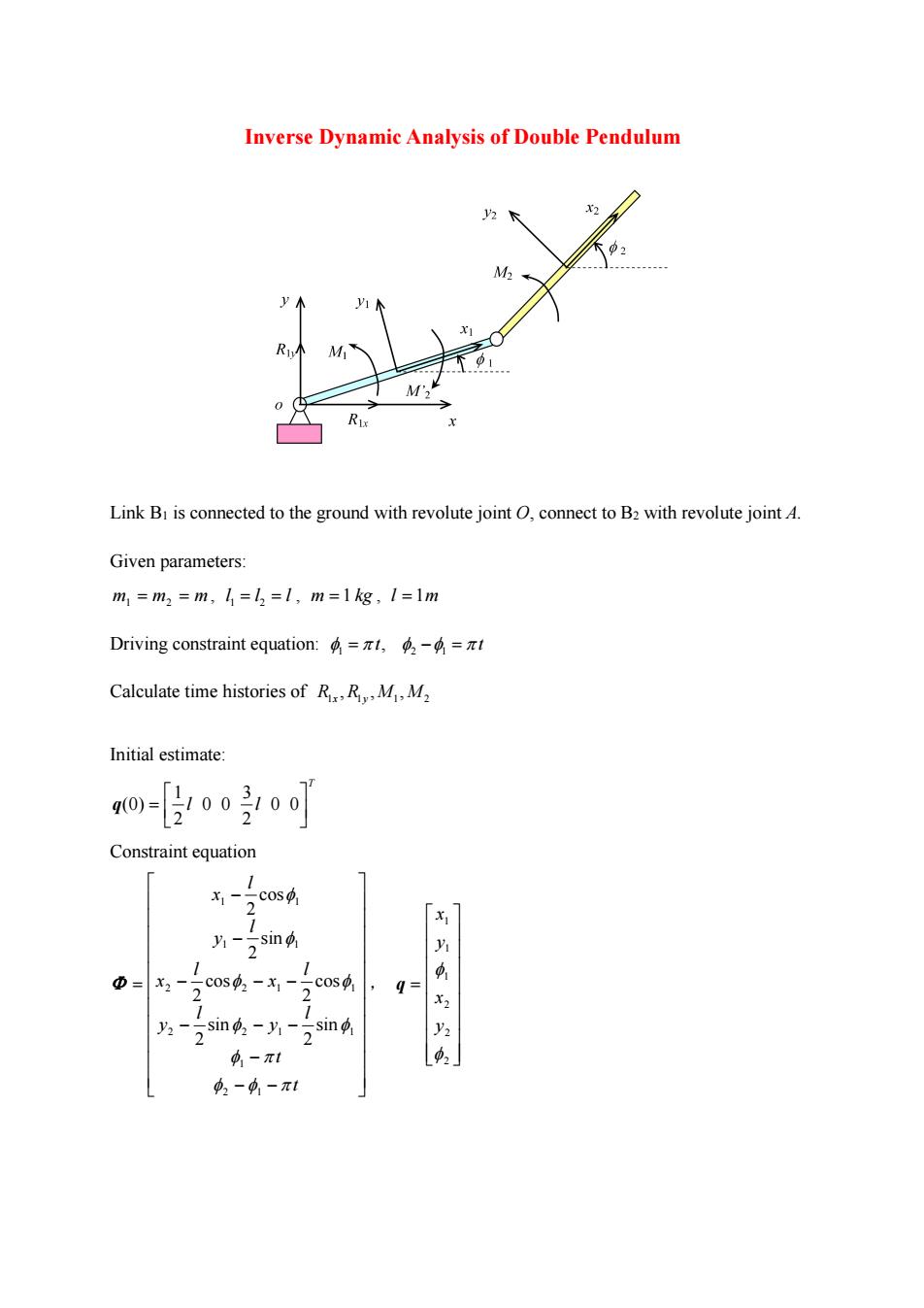
Inverse Dynamic Analysis of Double Pendulum X2 M2 M M R Link Bi is connected to the ground with revolute joint O,connect to B2 with revolute joint A. Given parameters: m1=m2=m,1=l2=1,m=1kg,1=1m Driving constraint equation:4=πt,4,-4=πt Calculate time histories of Rs,R,M,M2 Initial estimate: Constraint equation 1 x-cos 1 y-sin y )cos2-x1 -cos ,9= 1 1 y2 inysin y 41-π1 2] 42-4,-πtInverse Dynamic Analysis of Double Pendulum Link B1 is connected to the ground with revolute joint O, connect to B2 with revolute joint A. Given parameters: m1 m2 m , 1 2 l l l , m 1 kg , l 1m Driving constraint equation: 1 2 1 t, t Calculate time histories of 1 1 1 2 , , , R x R y M M Initial estimate: T l l 0 0 2 3 0 0 2 1 q(0) Constraint equation t t l y l y l x l x l y l x 2 1 1 2 2 1 1 2 2 1 1 1 1 1 1 sin 2 sin 2 cos 2 cos 2 sin 2 cos 2 , 2 2 2 1 1 1 y x y x q