正在加载图片...
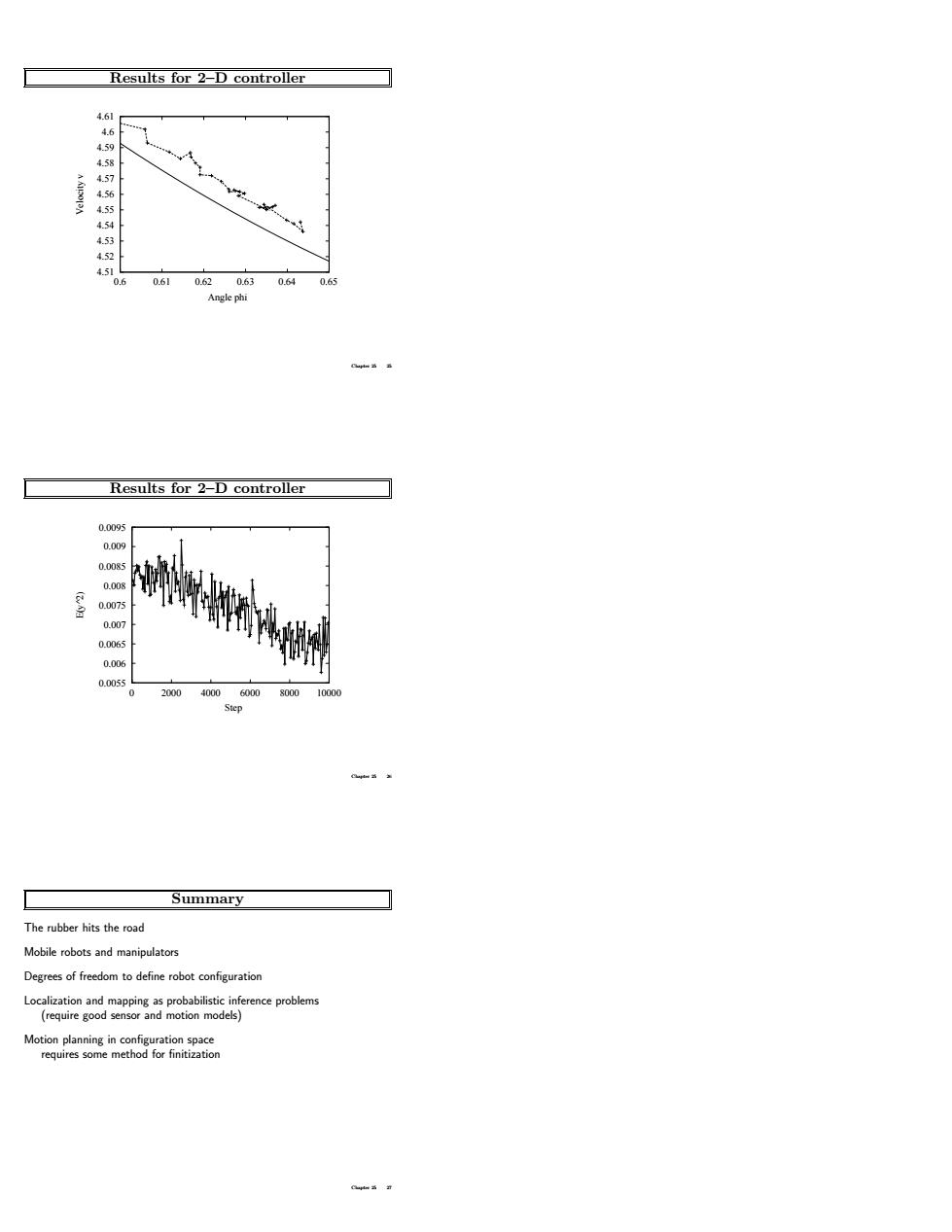
Results for 2-D controller 06 Results for 2-D controller 0075 Summary The rubber hits the road Mobile robots and manipulators mhResults for 2–D controller 4.51 4.52 4.53 4.54 4.55 4.56 4.57 4.58 4.59 4.6 4.61 0.6 0.61 0.62 0.63 0.64 0.65 Velocity v Angle phi Chapter 25 25 Results for 2–D controller 0.0055 0.006 0.0065 0.007 0.0075 0.008 0.0085 0.009 0.0095 0 2000 4000 6000 8000 10000 E(y^2) Step Chapter 25 26 Summary The rubber hits the road Mobile robots and manipulators Degrees of freedom to define robot configuration Localization and mapping as probabilistic inference problems (require good sensor and motion models) Motion planning in configuration space requires some method for finitization Chapter 25 27