正在加载图片...
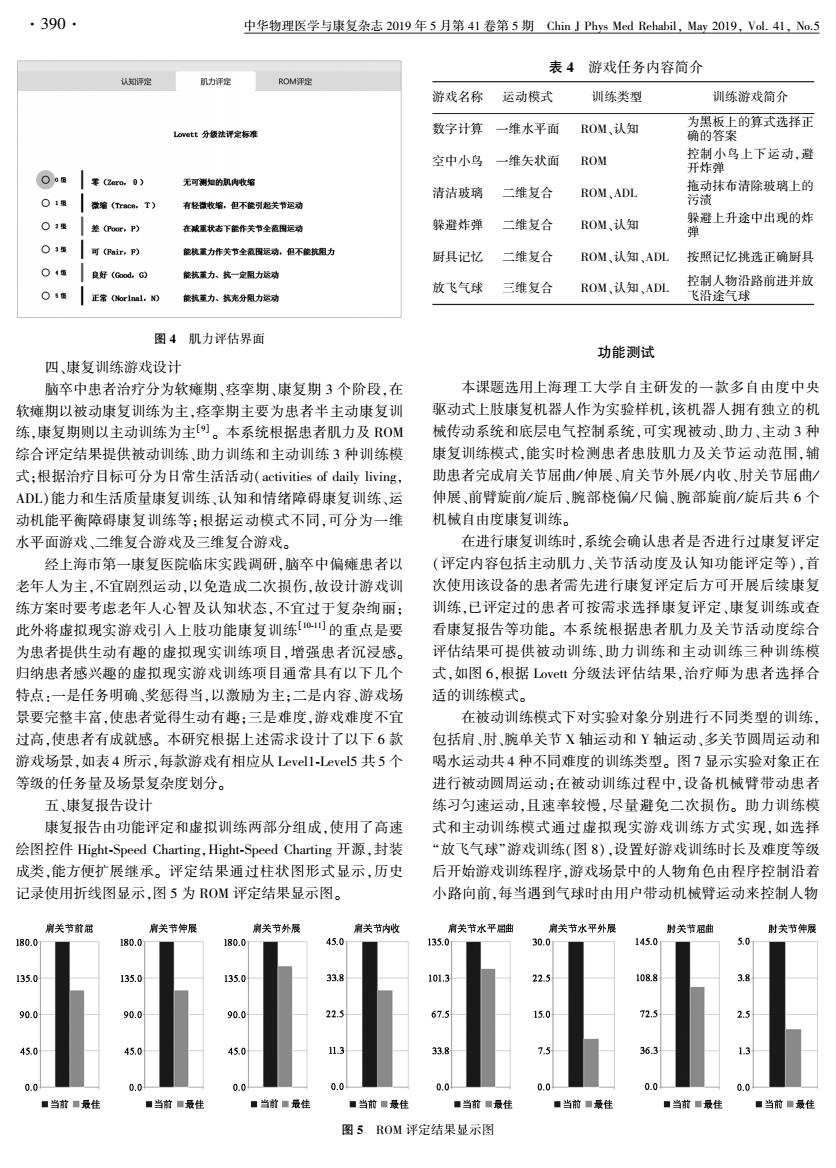
·390· 中华物理医学与康复杂志2019年5月第41卷第5期Chin J Phys Med Rehabil,May2019,Vol.41,No.5 表4游戏任务内容简介 认知评定 肌力汗定 ROM汗定 游戏名称 运动模式 训练类型 训练游戏简介 数字计算 一维水平面 ROM,认知 为黑板上的算式选择正 Lovett分极法评定标准 确的答案 空中小鸟 一维矢状面 ROM 控制小鸟上下运动,避 开炸弹 00履 零(2aro,0) 无可测如的肌肉收缩 清洁玻璃 二维复合 ROM、ADI 拖动抹布清除玻璃上的 01级 微缩(Trace,T) 有轻微收缩。但不能列起关节运动 污渍 01堡 差(roar,P) 在减重状志下能作关节全范周运功 躲避炸弹 二维复合 ROM、认知 躲避上升途中出现的炬 弹 ○3蛋 可(Pair,) 能机重力作关节全流运动,但不能抗阻力 厨具记忆 二维复合 ROM、认知、ADL 按照记忆挑选正确厨具 04重 良好(Cood,G) 能抗重力、抗一定阻力运动 放飞气球 三维复合 ROM、认知、ADL 控制人物沿路前进并放 正第(forInal..N) 能抗草力、抗充分粗力运动 飞沿途气球 图4肌力评估界面 功能测试 四、康复训练游戏设计 脑卒中患者治疗分为软瘫期、痉挛期、康复期3个阶段,在 本课题选用上海理工大学自主研发的一款多自由度中央 软瘫期以被动康复训练为主,痉挛期主要为患者半主动康复训 驱动式上肢康复机器人作为实验样机,该机器人拥有独立的机 练,康复期则以主动训练为主[)。本系统根据患者肌力及ROM 械传动系统和底层电气控制系统,可实现被动、助力、主动3种 综合评定结果提供被动训练、助力训练和主动训练3种训练模 康复训练模式,能实时检测患者患肢肌力及关节运动范围,辅 式:根据治疗目标可分为日常生活活动(activities of daily living, 助患者完成肩关节屈曲/伸展、肩关节外展/内收、肘关节屈曲/ ADL)能力和生活质量康复训练、认知和情绪障碍康复训练、运 伸展、前臂旋前/旋后、腕部桡偏/尺偏、腕部旋前/旋后共6个 动机能平衡障碍康复训练等:根据运动模式不同,可分为一维 机械自由度康复训练。 水平面游戏、二维复合游戏及三维复合游戏。 在进行康复训练时,系统会确认患者是否进行过康复评定 经上海市第一康复医院临床实践调研,脑卒中偏瘫患者以 (评定内容包括主动肌力、关节活动度及认知功能评定等),首 老年人为主,不宜剧烈运动,以免造成二次损伤,故设计游戏训 次使用该设备的患者需先进行康复评定后方可开展后续康复 练方案时要考虑老年人心智及认知状态,不宜过于复杂绚丽: 训练,已评定过的患者可按需求选择康复评定、康复训练或查 此外将虚拟现实游戏引入上肢功能康复训练山的重点是要 看康复报告等功能。本系统根据患者肌力及关节活动度综合 为患者提供生动有趣的虚拟现实训练项目,增强患者沉浸感。 评估结果可提供被动训练、助力训练和主动训练三种训练模 归纳患者感兴趣的虚拟现实游戏训练项目通常具有以下几个 式,如图6,根据Lovett分级法评估结果,治疗师为患者选择合 特点:一是任务明确、奖惩得当,以激励为主:二是内容、游戏场 适的训练模式。 景要完整丰富,使患者觉得生动有趣:三是难度,游戏难度不宜 在被动训练模式下对实验对象分别进行不同类型的训练, 过高,使患者有成就感。本研究根据上述需求设计了以下6款 包括肩、肘、腕单关节X轴运动和Y轴运动、多关节圆周运动和 游戏场景,如表4所示,每款游戏有相应从Levell-Level.5共5个 喝水运动共4种不同难度的训练类型。图7显示实验对象正在 等级的任务量及场景复杂度划分。 进行被动圆周运动:在被动训练过程中,设备机械臂带动患者 五、康复报告设计 练习匀速运动,且速率较慢,尽量避免二次损伤。助力训练模 康复报告由功能评定和虚拟训练两部分组成,使用了高速 式和主动训练模式通过虚拟现实游戏训练方式实现,如选择 绘图控件Hight-.Speed Charting,.Hight-.Speed Charting开源,封装 “放飞气球”游戏训练(图8),设置好游戏训练时长及难度等级 成类,能方便扩展继承。评定结果通过柱状图形式显示,历史 后开始游戏训练程序,游戏场景中的人物角色由程序控制沿着 记录使用折线图显示,图5为ROM评定结果显示图。 小路向前,每当遇到气球时由用户带动机械臂运动来控制人物 扇关节前屈 肩关节伸展 肩关节外展 扇关节内收 肩关节水平曲 肩关节水平外展 射关节屈曲 时关节伸展 180.0 180.0 180.0 45.0 135.0 G0.0 145.0 50 135.0 135.0 1350 33.8 101.3 22.5 108.8 90.0 90.0 90.0 22.5 67.5 15.0 72.3 45.0 45.0 45.0 10 0.0 0.0 0.0 0.D 0.0 0.0 ■当前■最佳 ■当前■最佳 ■当前■最佳 ■当前■最佳 ■当前■最住 ■当前■最佳 ■当前■最佳 ■当前■最佳 图5ROM评定结果显示图图 5 ROM 评定结果显示图 图 4 肌力评估界面 四、康复训练游戏设计 脑卒中患者治疗分为软瘫期、痉挛期、康复期 3 个阶段ꎬ在 软瘫期以被动康复训练为主ꎬ痉挛期主要为患者半主动康复训 练ꎬ康复期则以主动训练为主[9] ꎮ 本系统根据患者肌力及 ROM 综合评定结果提供被动训练、助力训练和主动训练 3 种训练模 式ꎻ根据治疗目标可分为日常生活活动(activities of daily livingꎬ ADL)能力和生活质量康复训练、认知和情绪障碍康复训练、运 动机能平衡障碍康复训练等ꎻ根据运动模式不同ꎬ可分为一维 水平面游戏、二维复合游戏及三维复合游戏ꎮ 经上海市第一康复医院临床实践调研ꎬ脑卒中偏瘫患者以 老年人为主ꎬ不宜剧烈运动ꎬ以免造成二次损伤ꎬ故设计游戏训 练方案时要考虑老年人心智及认知状态ꎬ不宜过于复杂绚丽ꎻ 此外将虚拟现实游戏引入上肢功能康复训练[10 ̄11] 的重点是要 为患者提供生动有趣的虚拟现实训练项目ꎬ增强患者沉浸感ꎮ 归纳患者感兴趣的虚拟现实游戏训练项目通常具有以下几个 特点:一是任务明确、奖惩得当ꎬ以激励为主ꎻ二是内容、游戏场 景要完整丰富ꎬ使患者觉得生动有趣ꎻ三是难度ꎬ游戏难度不宜 过高ꎬ使患者有成就感ꎮ 本研究根据上述需求设计了以下 6 款 游戏场景ꎬ如表 4 所示ꎬ每款游戏有相应从 Level1 ̄Level5 共 5 个 等级的任务量及场景复杂度划分ꎮ 五、康复报告设计 康复报告由功能评定和虚拟训练两部分组成ꎬ使用了高速 绘图控件 Hight ̄Speed ChartingꎬHight ̄Speed Charting 开源ꎬ封装 成类ꎬ能方便扩展继承ꎮ 评定结果通过柱状图形式显示ꎬ历史 记录使用折线图显示ꎬ图 5 为 ROM 评定结果显示图ꎮ 表 4 游戏任务内容简介 游戏名称 运动模式 训练类型 训练游戏简介 数字计算 一维水平面 ROM、认知 为黑板上的算式选择正 确的答案 空中小鸟 一维矢状面 ROM 控制小鸟上下运动ꎬ避 开炸弹 清洁玻璃 二维复合 ROM、ADL 拖动抹布清除玻璃上的 污渍 躲避炸弹 二维复合 ROM、认知 躲避上升途中出现的炸 弹 厨具记忆 二维复合 ROM、认知、ADL 按照记忆挑选正确厨具 放飞气球 三维复合 ROM、认知、ADL 控制人物沿路前进并放 飞沿途气球 功能测试 本课题选用上海理工大学自主研发的一款多自由度中央 驱动式上肢康复机器人作为实验样机ꎬ该机器人拥有独立的机 械传动系统和底层电气控制系统ꎬ可实现被动、助力、主动 3 种 康复训练模式ꎬ能实时检测患者患肢肌力及关节运动范围ꎬ辅 助患者完成肩关节屈曲/ 伸展、肩关节外展/ 内收、肘关节屈曲/ 伸展、前臂旋前/ 旋后、腕部桡偏/ 尺偏、腕部旋前/ 旋后共 6 个 机械自由度康复训练ꎮ 在进行康复训练时ꎬ系统会确认患者是否进行过康复评定 (评定内容包括主动肌力、关节活动度及认知功能评定等)ꎬ首 次使用该设备的患者需先进行康复评定后方可开展后续康复 训练ꎬ已评定过的患者可按需求选择康复评定、康复训练或查 看康复报告等功能ꎮ 本系统根据患者肌力及关节活动度综合 评估结果可提供被动训练、助力训练和主动训练三种训练模 式ꎬ如图 6ꎬ根据 Lovett 分级法评估结果ꎬ治疗师为患者选择合 适的训练模式ꎮ 在被动训练模式下对实验对象分别进行不同类型的训练ꎬ 包括肩、肘、腕单关节 X 轴运动和 Y 轴运动、多关节圆周运动和 喝水运动共 4 种不同难度的训练类型ꎮ 图 7 显示实验对象正在 进行被动圆周运动ꎻ在被动训练过程中ꎬ设备机械臂带动患者 练习匀速运动ꎬ且速率较慢ꎬ尽量避免二次损伤ꎮ 助力训练模 式和主动训练模式通过虚拟现实游戏训练方式实现ꎬ如选择 “放飞气球”游戏训练(图 8)ꎬ设置好游戏训练时长及难度等级 后开始游戏训练程序ꎬ游戏场景中的人物角色由程序控制沿着 小路向前ꎬ每当遇到气球时由用户带动机械臂运动来控制人物 390 中华物理医学与康复杂志 2019 年 5 月第 41 卷第 5 期 Chin J Phys Med Rehabilꎬ May 2019ꎬ Vol. 41ꎬ No.5