正在加载图片...
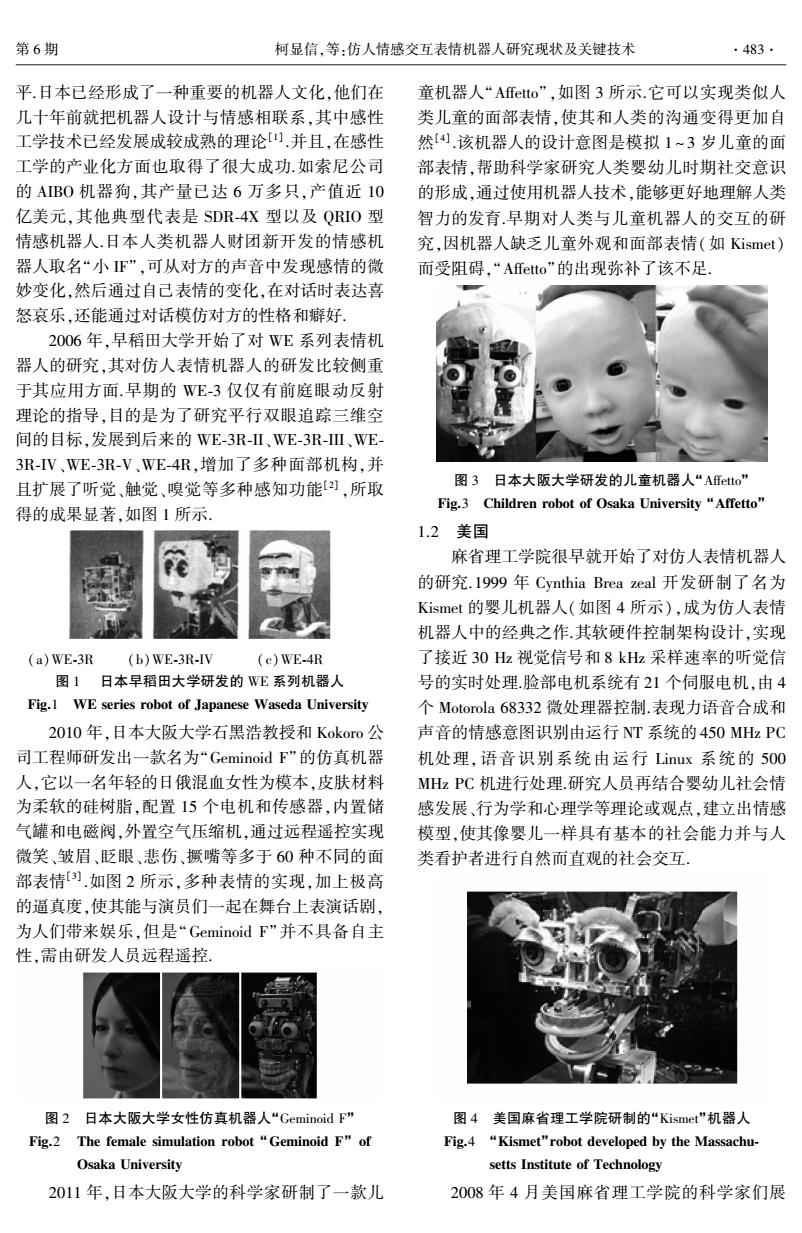
第6期 柯显信,等:仿人情感交互表情机器人研究现状及关键技术 ·483 平.日本已经形成了一种重要的机器人文化,他们在 童机器人“Affetto”,如图3所示.它可以实现类似人 几十年前就把机器人设计与情感相联系,其中感性 类儿童的面部表情,使其和人类的沟通变得更加自 工学技术已经发展成较成熟的理论山.并且,在感性 然[4).该机器人的设计意图是模拟1~3岁儿童的面 工学的产业化方面也取得了很大成功.如索尼公司 部表情,帮助科学家研究人类婴幼儿时期社交意识 的AB0机器狗,其产量已达6万多只,产值近10 的形成,通过使用机器人技术,能够更好地理解人类 亿美元,其他典型代表是SDR-4X型以及QRI0型 智力的发育.早期对人类与儿童机器人的交互的研 情感机器人.日本人类机器人财团新开发的情感机 究,因机器人缺乏儿童外观和面部表情(如Kismet) 器人取名“小F”,可从对方的声音中发现感情的微 而受阻碍,“Affetto'”的出现弥补了该不足 妙变化,然后通过自己表情的变化,在对话时表达喜 怒哀乐,还能通过对话模仿对方的性格和癖好. 2006年,早稻田大学开始了对WE系列表情机 器人的研究,其对仿人表情机器人的研发比较侧重 于其应用方面.早期的WE-3仅仅有前庭眼动反射 理论的指导,目的是为了研究平行双眼追踪三维空 间的目标,发展到后来的WE-3R-Ⅱ、WE-3R-Ⅲ、WE 3R-IV、WE-3R-V、WE-4R,增加了多种面部机构,并 且扩展了听觉、触觉、嗅觉等多种感知功能),所取 图3日本大阪大学研发的儿童机器人“Affetto” Fig.3 Children robot of Osaka University "Affetto" 得的成果显著,如图1所示 1.2美国 麻省理工学院很早就开始了对仿人表情机器人 的研究.1999年Cynthia Brea zeal开发研制了名为 Kismet的婴儿机器人(如图4所示),成为仿人表情 机器人中的经典之作.其软硬件控制架构设计,实现 (a)WE-3R (b)WE-3R-IV (c)WE-4R 了接近30Hz视觉信号和8kHz采样速率的听觉信 图1日本早稻田大学研发的WE系列机器人 号的实时处理.脸部电机系统有21个伺服电机,由4 Fig.1 WE series robot of Japanese Waseda University 个Motorola68332微处理器控制.表现力语音合成和 2010年,日本大阪大学石黑浩教授和Kokoro公 声音的情感意图识别由运行NT系统的450 MHz PC 司工程师研发出一款名为“Geminoid F”的仿真机器 机处理,语音识别系统由运行Linux系统的500 人,它以一名年轻的日俄混血女性为模本,皮肤材料 MHz PC机进行处理.研究人员再结合婴幼儿社会情 为柔软的硅树脂,配置15个电机和传感器,内置储 感发展、行为学和心理学等理论或观点,建立出情感 气罐和电磁阀,外置空气压缩机,通过远程遥控实现 模型,使其像婴儿一样具有基本的社会能力并与人 微笑、皱眉、眨眼、悲伤、撅嘴等多于60种不同的面 类看护者进行自然而直观的社会交互. 部表情)如图2所示,多种表情的实现,加上极高 的逼真度,使其能与演员们一起在舞台上表演话剧, 为人们带来娱乐,但是“Geminoid F”并不具备自主 性,需由研发人员远程遥控 图2日本大阪大学女性仿真机器人“Geminoid F” 图4美国麻省理工学院研制的“Kismet'”机器人 Fig.2 The female simulation robot "Geminoid F"of Fig.4 "Kismet"robot developed by the Massachu- Osaka University setts Institute of Technology 2011年,日本大阪大学的科学家研制了一款儿 2008年4月美国麻省理工学院的科学家们展平.日本已经形成了一种重要的机器人文化,他们在 几十年前就把机器人设计与情感相联系,其中感性 工学技术已经发展成较成熟的理论[1] .并且,在感性 工学的产业化方面也取得了很大成功.如索尼公司 的 AIBO 机器狗,其产量已达 6 万多只,产值近 10 亿美元,其他典型代表是 SDR⁃4X 型以及 QRIO 型 情感机器人.日本人类机器人财团新开发的情感机 器人取名“小 IF”,可从对方的声音中发现感情的微 妙变化,然后通过自己表情的变化,在对话时表达喜 怒哀乐,还能通过对话模仿对方的性格和癖好. 2006 年,早稻田大学开始了对 WE 系列表情机 器人的研究,其对仿人表情机器人的研发比较侧重 于其应用方面.早期的 WE⁃3 仅仅有前庭眼动反射 理论的指导,目的是为了研究平行双眼追踪三维空 间的目标,发展到后来的 WE⁃3R⁃II、WE⁃3R⁃III、WE⁃ 3R⁃IV、WE⁃3R⁃V、WE⁃4R,增加了多种面部机构,并 且扩展了听觉、触觉、嗅觉等多种感知功能[2] ,所取 得的成果显著,如图 1 所示. (a)WE⁃3R (b)WE⁃3R⁃IV (c)WE⁃4R 图 1 日本早稻田大学研发的 WE 系列机器人 Fig.1 WE series robot of Japanese Waseda University 2010 年,日本大阪大学石黑浩教授和 Kokoro 公 司工程师研发出一款名为“Geminoid F”的仿真机器 人,它以一名年轻的日俄混血女性为模本,皮肤材料 为柔软的硅树脂,配置 15 个电机和传感器,内置储 气罐和电磁阀,外置空气压缩机,通过远程遥控实现 微笑、皱眉、眨眼、悲伤、撅嘴等多于 60 种不同的面 部表情[3] .如图 2 所示,多种表情的实现,加上极高 的逼真度,使其能与演员们一起在舞台上表演话剧, 为人们带来娱乐,但是“Geminoid F”并不具备自主 性,需由研发人员远程遥控. 图 2 日本大阪大学女性仿真机器人“Geminoid F” Fig.2 The female simulation robot “Geminoid F” of Osaka University 2011 年,日本大阪大学的科学家研制了一款儿 童机器人“Affetto”,如图 3 所示.它可以实现类似人 类儿童的面部表情,使其和人类的沟通变得更加自 然[4] .该机器人的设计意图是模拟 1 ~ 3 岁儿童的面 部表情,帮助科学家研究人类婴幼儿时期社交意识 的形成,通过使用机器人技术,能够更好地理解人类 智力的发育.早期对人类与儿童机器人的交互的研 究,因机器人缺乏儿童外观和面部表情(如 Kismet) 而受阻碍,“Affetto”的出现弥补了该不足. 图 3 日本大阪大学研发的儿童机器人“Affetto” Fig.3 Children robot of Osaka University “Affetto” 1.2 美国 麻省理工学院很早就开始了对仿人表情机器人 的研究.1999 年 Cynthia Brea zeal 开发研制了名为 Kismet 的婴儿机器人(如图 4 所示),成为仿人表情 机器人中的经典之作.其软硬件控制架构设计,实现 了接近 30 Hz 视觉信号和 8 kHz 采样速率的听觉信 号的实时处理.脸部电机系统有 21 个伺服电机,由 4 个 Motorola 68332 微处理器控制.表现力语音合成和 声音的情感意图识别由运行 NT 系统的 450 MHz PC 机处理, 语音识别系统由运行 Linux 系统的 500 MHz PC 机进行处理.研究人员再结合婴幼儿社会情 感发展、行为学和心理学等理论或观点,建立出情感 模型,使其像婴儿一样具有基本的社会能力并与人 类看护者进行自然而直观的社会交互. 图 4 美国麻省理工学院研制的“Kismet”机器人 Fig.4 “Kismet”robot developed by the Massachu⁃ setts Institute of Technology 2008 年 4 月美国麻省理工学院的科学家们展 第 6 期 柯显信,等:仿人情感交互表情机器人研究现状及关键技术 ·483·