正在加载图片...
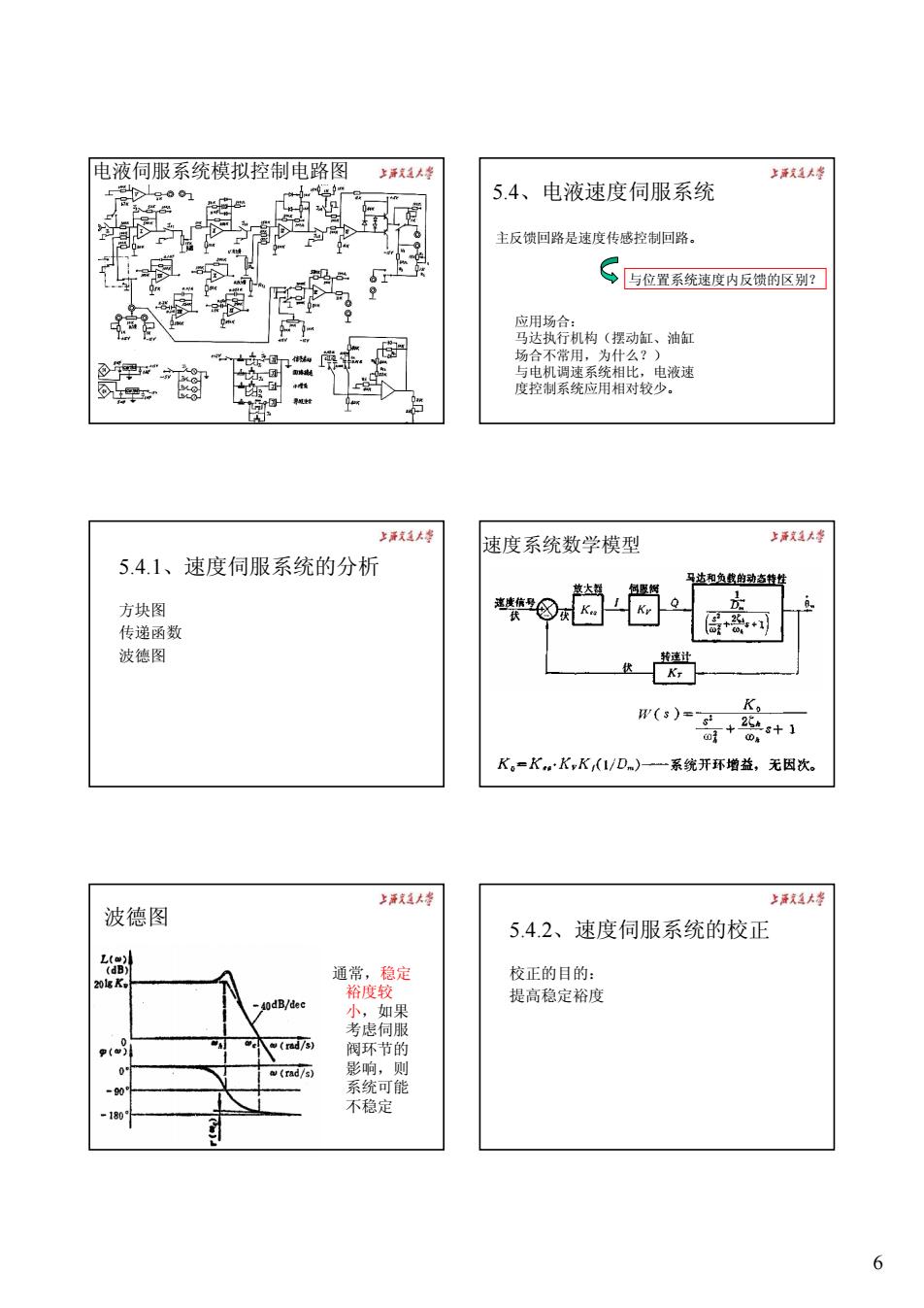
电液伺服系统模拟控制电路图 上泽大 上浙克1大当 5.4、电液速度伺服系统 主反馈回路是速度传感控制回路。 ,与位置系统速度内反馈的区别? 应用场合: 马达执行机构(摆动缸、油缸 4 场合不常用,为什么?) 与电机调速系统相比,电液速 度控制系统应用相对较少。 )承文点人岁 速度系统数学模型 上泽文大举 5.4.1、速度伺服系统的分析 母达和负戡的动苍持性 方块图 传递函数 波德图 转速计 K w(s)=s Ko 8++1 K。=KK,K(l/D)一系统开环增益,无因次。 上泽元1大孝 上活丝大举 波德图 5.4.2、速度伺服系统的校正 L(o) (dB) 通常,稳定 校正的目的: 201g K 裕度较 0dB/dec 提高稳定裕度 小,如果 考虑伺服 (rd/s) 阀环节的 (rad/s) 影响,则 -90 系统可能 -180 不稳定 66 电液伺服系统模拟控制电路图 5.4、电液速度伺服系统 与位置系统速度内反馈的区别? 应用场合: 马达执行机构(摆动缸、油缸 场合不常用,为什么?) 与电机调速系统相比,电液速 度控制系统应用相对较少。 主反馈回路是速度传感控制回路。 5.4.1、速度伺服系统的分析 方块图 传递函数 波德图 速度系统数学模型 波德图 通常,稳定 裕度较 小,如果 考虑伺服 阀环节的 影响,则 系统可能 不稳定 5.4.2、速度伺服系统的校正 校正的目的: 提高稳定裕度