正在加载图片...
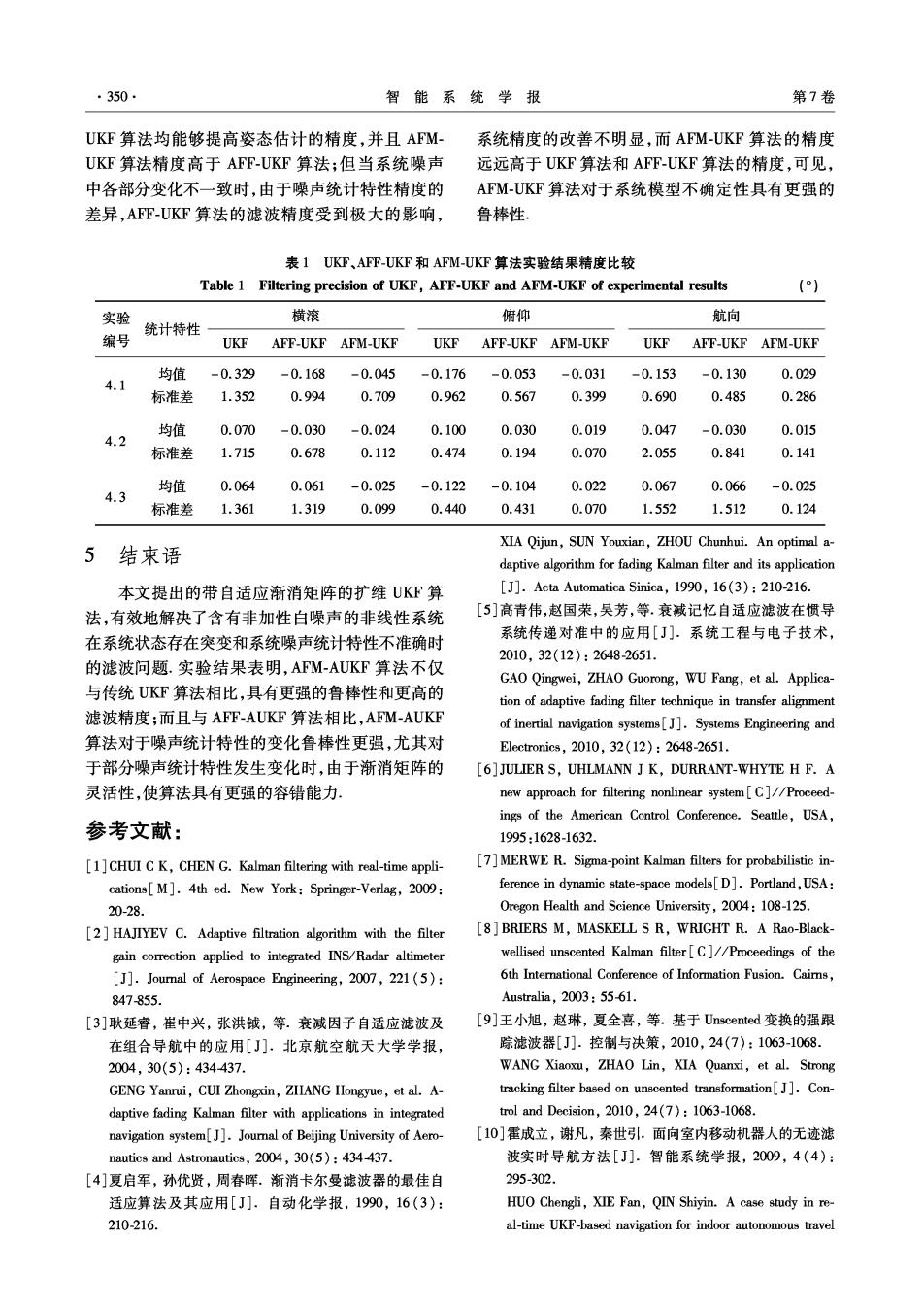
·350 智能系统学报 第7卷 UKF算法均能够提高姿态估计的精度,并且AFM- 系统精度的改善不明显,而AFM-UKF算法的精度 UKF算法精度高于AFP-UKF算法;但当系统噪声 远远高于UKF算法和AFF-UKF算法的精度,可见, 中各部分变化不一致时,由于噪声统计特性精度的 AFM-UKF算法对于系统模型不确定性具有更强的 差异,AFF-UKF算法的滤波精度受到极大的影响, 鲁棒性 表1UKF、AFT-UKF和AFM-UKF算法实验结果精度比较 Table 1 Filtering precision of UKF,AFF-UKF and AFM-UKF of experimental results () 实验 横滚 俯仰 航向 统计特性 编号 UKF AFF-UKF AFM-UKF UKF AFF-UKF AFM-UKF UKF AFF-UKF AFM-UKF 均值 -0.329 -0.168 -0.045 -0.176 -0.053 -0.031 -0.153 -0.130 0.029 4.1 标准差 1.352 0.994 0.709 0.962 0.567 0.399 0.690 0.485 0.286 均值 0.070 -0.030 -0.024 0.100 0.030 0.019 0.047 -0.030 0.015 4.2 标准差 1.715 0.678 0.112 0.474 0.194 0.070 2.055 0.841 0.141 均值 0.064 0.061 -0.025 -0.122 -0.104 0.022 0.067 0.066 -0.025 4.3 标准差 1.361 1.319 0.099 0.440 0.431 0.070 1.552 1.512 0.124 XIA Qijun,SUN Youxian,ZHOU Chunhui.An optimal a- 5结束语 daptive algorithm for fading Kalman filter and its application 本文提出的带自适应渐消矩阵的扩维UKF算 [J].Acta Automatica Sinica,1990,16(3):210-216. 法,有效地解决了含有非加性白噪声的非线性系统 [5]高青伟,赵国荣,吴芳,等.衰减记忆自适应滤波在惯导 在系统状态存在突变和系统噪声统计特性不准确时 系统传递对准中的应用[J].系统工程与电子技术, 2010,32(12):2648-2651. 的滤波问题.实验结果表明,AFM-AUKF算法不仅 GAO Qingwei,ZHAO Guorong,WU Fang,et al.Applica- 与传统UKF算法相比,具有更强的鲁棒性和更高的 tion of adaptive fading filter technique in transfer alignment 滤波精度;而且与AFF-AUKF算法相比,AFM-AUKF of inertial navigation systems[J].Systems Engineering and 算法对于噪声统计特性的变化鲁棒性更强,尤其对 Electronics3,2010,32(12):2648-2651. 于部分噪声统计特性发生变化时,由于渐消矩阵的 [6]JULIER S,UHLMANN J K,DURRANT-WHYTE H F.A 灵活性,使算法具有更强的容错能力, new approach for filtering nonlinear system[C]//Proceed- ings of the American Control Conference.Seattle,USA, 参考文献: 1995:1628-1632. [1]CHUI C K,CHEN G.Kalman filtering with real-time appli- [7]MERWE R.Sigma-point Kalman filters for probabilistic in- cations[M].4th ed.New York:Springer-Verlag,2009: ference in dynamic state-space models[D].Portland,USA: 20-28. Oregon Health and Science University,2004:108-125. [2]HAJIYEV C.Adaptive filtration algorithm with the filter [8 BRIERS M,MASKELL S R,WRIGHT R.A Rao-Black- gain correction applied to integrated INS/Radar altimeter wellised unscented Kalman filter[C]//Proceedings of the [J].Journal of Aerospace Engineering,2007,221(5): 6th International Conference of Information Fusion.Caims, 847855. Australia,2003:55-61. [3]耿延奢,崔中兴,张洪钺,等.衰减因子自适应滤波及 [9]王小旭,赵琳,夏全喜,等,基于Unscented变换的强跟 在组合导航中的应用[J],北京航空航天大学学报, 踪滤波器[J].控制与决策,2010,24(7):1063-1068. 2004,30(5):434437. WANG Xiaoxu,ZHAO Lin,XIA Quanxi,et al.Strong GENG Yanrui,CUI Zhongxin,ZHANG Hongyue,et al.A- tracking filter based on unscented transformation[J].Con- daptive fading Kalman filter with applications in integrated trol and Decis9ion,2010,24(7):1063-1068. navigation system[J].Joumal of Beijing University of Aero- [10]霍成立,谢凡,秦世引.面向室内移动机器人的无迹滤 nautics and Astronautics,2004,30(5):434-437. 波实时导航方法[J].智能系统学报,2009,4(4): [4]夏启军,孙优贤,周春晖.渐消卡尔曼滤波器的最佳自 295-302. 适应算法及其应用[J].自动化学报,1990,16(3): HUO Chengli,XIE Fan,QIN Shiyin.A case study in re- 210-216. al-time UKF-based navigation for indoor autonomous travel