正在加载图片...
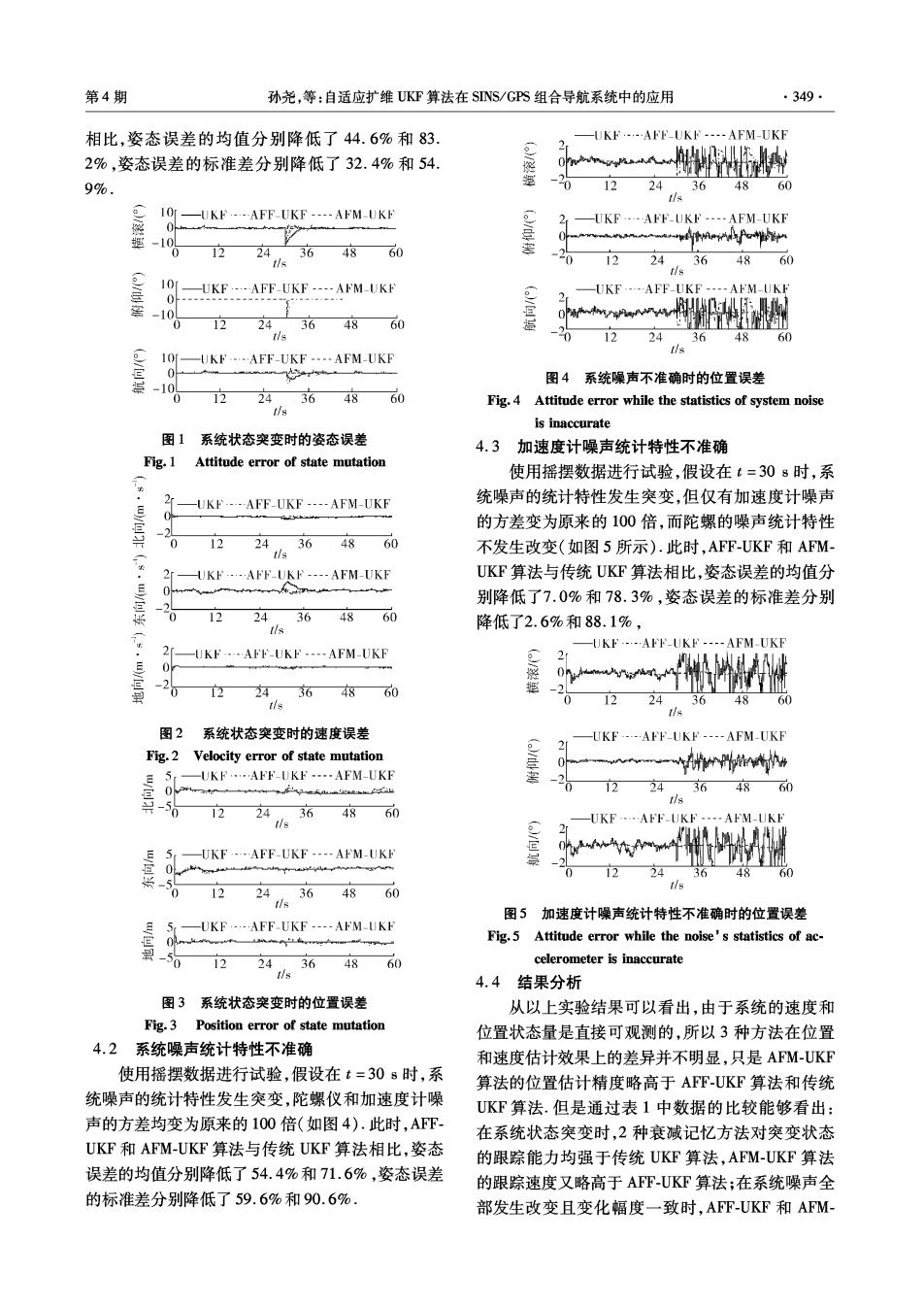
第4期 孙尧,等:自适应扩维UKF算法在SNS/CPS组合导航系统中的应用 ·349. 相比,姿态误差的均值分别降低了44.6%和83, UKF.---AFF-UKK----AFM-UKE 2%,姿态误差的标准差分别降低了32.4%和54. 压 9%. 12 24364860 ts 。0 10 一UKF-AFF-UKF--AM-UK 0 。 -UKF----AFF-UKF----AFM-UKF -10 nnt户o的 12 24 364860 12 24 36 4860 10[-UKF----AFF-UKF ----AFM-UKF 。 -UKF----AFF-UKF ----AFM-UKK -10 0P4nwww4用 12 24 3648 60 钩州 0 12 24 364860 tis IOf—UKF---AFF-UKF…AFM-UKF 0 图4 系统噪声不准确时的位置误差 -10 0 12 24364860 Fig.4 Attitude error while the statistics of system noise t/s is inaccurate 图1 系统状态突变时的姿态误差 4.3加速度计噪声统计特性不准确 Fig.1 Attitude error of state mutation 使用摇摆数据进行试验,假设在t=308时,系 —K-·AFF-UKF--AFM-UKF 统噪声的统计特性发生突变,但仅有加速度计噪声 的方差变为原来的100倍,而陀螺的噪声统计特性 12 24 36 48 60 t/s 不发生改变(如图5所示).此时,AFF-UKF和AFM- -UKF---AFF_UKF----AFM-UKF UKF算法与传统UKF算法相比,姿态误差的均值分 别降低了7.0%和78.3%,姿态误差的标准差分别 0 12 24 36 48 60 降低了2.6%和88.1%, —KF…AF-UKF--AFM-UKF —UKE--AFE-UKF---AFM-UKF 0 AW 12 24364860 -20 0 12 24364860 图2 系统状态突变时的速度误差 -UKF----AFF-UKF----AFM-UKF 2 Fig.2 Velocity error of state mutation 5 -UKF.--AFF-UKF----AFM-UKF 饰nw So 0 12 24.364860 12 24 364860 tls -UKF---AFF-UKF----AFM-UKF -UKF----AFF-UKF ----AFM-UKF 性型随 12 24 乐- 0 36 48 60 0 12 24 36 4860 t/s 图5加速度计噪声统计特性不准确时的位置误差 53e —UKF…AFF-UKF---AF'M-UKF Fig.5 Attitude error while the noise's statistics of ac- 50 12 24 36 48 60 celerometer is inaccurate I/s 4.4结果分析 图3系统状态突变时的位置误差 从以上实验结果可以看出,由于系统的速度和 Fig.3 Position error of state mutation 位置状态量是直接可观测的,所以3种方法在位置 4.2系统噪声统计特性不准确 和速度估计效果上的差异并不明显,只是AFM-UKF 使用摇摆数据进行试验,假设在t=30s时,系 算法的位置估计精度略高于AFP-UKF算法和传统 统噪声的统计特性发生突变,陀螺仪和加速度计噪 UKF算法.但是通过表1中数据的比较能够看出: 声的方差均变为原来的100倍(如图4).此时,AF℉- 在系统状态突变时,2种衰减记忆方法对突变状态 UKF和AFM-UKF算法与传统UKF算法相比,姿态 的跟踪能力均强于传统UKF算法,AFM-UKF算法 误差的均值分别降低了54.4%和71.6%,姿态误差 的跟踪速度又略高于AFT-UKF算法;在系统噪声全 的标准差分别降低了59.6%和90.6%. 部发生改变且变化幅度一致时,AFF-UKF和AFM