正在加载图片...
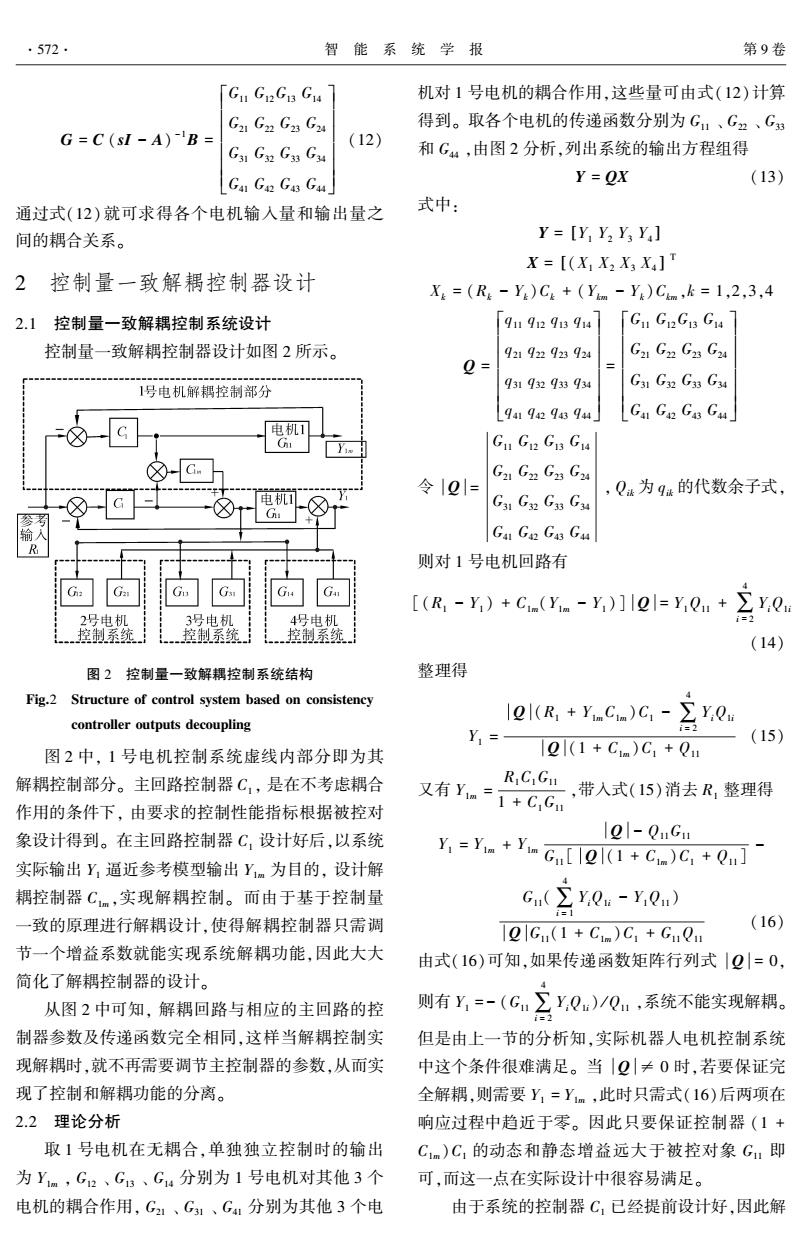
.572. 智能系统学报 第9卷 「G1GG3G4 机对1号电机的耦合作用,这些量可由式(12)计算 Ga Gn Ga Gu 得到。取各个电机的传递函数分别为G、G2、G知 G=C(sI-A)B= (12) Ga Gn Ga Gu 和G44,由图2分析,列出系统的输出方程组得 G41GG43G44 Y=OX (13) 通过式(12)就可求得各个电机输入量和输出量之 式中: 间的耦合关系。 Y=[Y,Y,Y3 Y] X=[(X X2 X3 X]T 2控制量一致解耦控制器设计 X=(R-Y)C5+(Ym-Y)Cm,k=1,2,3,4 2.1控制量一致解耦控制系统设计 911912913914 [Gu GRGB Gu 控制量一致解耦控制器设计如图2所示。 921922923924 G21G2G23G24 0= 1号电机解耦控制部分 931932933934 G31G32G3G34 L94194294394J Ga GR Ga Gu 电机1 Gu GR2 GB Gu G2 G22 G3 G24 令I01= ,Q为9k的代数余子式, 电机1 Ga Gx Ga Gu n 输入 G41G42G43G44 则对1号电机回路有 G [(R -Y)+Ci(Yim -Y,)]l21=Yn+ 2号电机 3号电机 4号电机 立Q 控制系统 控拟系统 控制系统。 (14) 图2控制量一致解耦控制系统结构 整理得 Fig.2 Structure of control system based on consistency controller outputs decoupling |Ql(R,+yCa)C-∑yQm Y1= (15) 图2中,1号电机控制系统虚线内部分即为其 1(1+Cim)C+u 解耦控制部分。主回路控制器C,是在不考虑耦合 RC,G,带入式(15)消去R,整理得 作用的条件下,由要求的控制性能指标根据被控对 又有Ym=1+C,Gm 象设计得到。在主回路控制器C,设计好后,以系统 121-QnGu 实际输出Y,逼近参考模型输出Y1m为目的,设计解 Y=Y+Y Cu[el(1+C)C+u] 耦控制器Cm,实现解耦控制。而由于基于控制量 G(∑y,Q-y,Q) 一致的原理进行解耦设计,使得解耦控制器只需调 (16) QGu(1+Cim)C:+GuQ 节一个增益系数就能实现系统解耦功能,因此大大 由式(16)可知,如果传递函数矩阵行列式|Q=0, 简化了解耦控制器的设计。 从图2中可知,解耦回路与相应的主回路的控 则有y-(Gn三yQ)/0u,系统不能实现解耦。 制器参数及传递函数完全相同,这样当解耦控制实 但是由上一节的分析知,实际机器人电机控制系统 现解耦时,就不再需要调节主控制器的参数,从而实 中这个条件很难满足。当|Q|≠0时,若要保证完 现了控制和解耦功能的分离。 全解耦,则需要Y=Ym,此时只需式(16)后两项在 2.2理论分析 响应过程中趋近于零。因此只要保证控制器(1+ 取1号电机在无耦合,单独独立控制时的输出 C1m)C,的动态和静态增益远大于被控对象G,即 为Ym,G2、G:、G4分别为1号电机对其他3个 可,而这一点在实际设计中很容易满足。 电机的耦合作用,G2:、G31、G41分别为其他3个电 由于系统的控制器C,已经提前设计好,因此解G = C (sI - A) -1B = G11 G12G13 G14 G21 G22 G23 G24 G31 G32 G33 G34 G41 G42 G43 G44 é ë ê ê ê ê ê ê ù û ú ú ú ú ú ú (12) 通过式(12)就可求得各个电机输入量和输出量之 间的耦合关系。 2 控制量一致解耦控制器设计 2.1 控制量一致解耦控制系统设计 控制量一致解耦控制器设计如图 2 所示。 图 2 控制量一致解耦控制系统结构 Fig.2 Structure of control system based on consistency controller outputs decoupling 图 2 中, 1 号电机控制系统虚线内部分即为其 解耦控制部分。 主回路控制器 C1 , 是在不考虑耦合 作用的条件下, 由要求的控制性能指标根据被控对 象设计得到。 在主回路控制器 C1 设计好后,以系统 实际输出 Y1 逼近参考模型输出 Y1m 为目的, 设计解 耦控制器 C1m ,实现解耦控制。 而由于基于控制量 一致的原理进行解耦设计,使得解耦控制器只需调 节一个增益系数就能实现系统解耦功能,因此大大 简化了解耦控制器的设计。 从图 2 中可知, 解耦回路与相应的主回路的控 制器参数及传递函数完全相同,这样当解耦控制实 现解耦时,就不再需要调节主控制器的参数,从而实 现了控制和解耦功能的分离。 2.2 理论分析 取 1 号电机在无耦合,单独独立控制时的输出 为 Y1m , G12 、 G13 、 G14 分别为 1 号电机对其他 3 个 电机的耦合作用, G21 、 G31 、 G41 分别为其他 3 个电 机对 1 号电机的耦合作用,这些量可由式(12)计算 得到。 取各个电机的传递函数分别为 G11 、 G22 、 G33 和 G44 ,由图 2 分析,列出系统的输出方程组得 Y = QX (13) 式中: Y = Y1 Y2 Y3 Y4 [ ] X = (X1 X2 X3 X4 [ ] T Xk = (Rk - Yk)Ck + (Ykm - Yk)Ckm ,k = 1,2,3,4 Q = q11 q12 q13 q14 q21 q22 q23 q24 q31 q32 q33 q34 q41 q42 q43 q44 é ë ê ê ê ê ê ê ù û ú ú ú ú ú ú = G11 G12G13 G14 G21 G22 G23 G24 G31 G32 G33 G34 G41 G42 G43 G44 é ë ê ê ê ê ê ê ù û ú ú ú ú ú ú 令 Q = G11 G12 G13 G14 G21 G22 G23 G24 G31 G32 G33 G34 G41 G42 G43 G44 , Qik 为 qik 的代数余子式, 则对 1 号电机回路有 [(R1 - Y1 ) + C1m(Y1m - Y1 )] Q = Y1Q11 + ∑ 4 i = 2 YiQ1i (14) 整理得 Y1 = Q (R1 + Y1m C1m )C1 - ∑ 4 i = 2 YiQ1i Q (1 + C1m )C1 + Q11 (15) 又有 Y1m = R1C1G11 1 + C1G11 ,带入式(15)消去 R1 整理得 Y1 = Y1m + Y1m Q - Q11G11 G11 [ Q (1 + C1m )C1 + Q11 ] - G11(∑ 4 i = 1 YiQ1i - Y1Q11 ) Q G11(1 + C1m )C1 + G11Q11 (16) 由式(16)可知,如果传递函数矩阵行列式 Q = 0, 则有 Y1 = - (G11∑ 4 i = 2 YiQ1i) / Q11 ,系统不能实现解耦。 但是由上一节的分析知,实际机器人电机控制系统 中这个条件很难满足。 当 Q ≠ 0 时,若要保证完 全解耦,则需要 Y1 = Y1m ,此时只需式(16)后两项在 响应过程中趋近于零。 因此只要保证控制器 (1 + C1m )C1 的动态和静态增益远大于被控对象 G11 即 可,而这一点在实际设计中很容易满足。 由于系统的控制器 C1 已经提前设计好,因此解 ·572· 智 能 系 统 学 报 第 9 卷