正在加载图片...
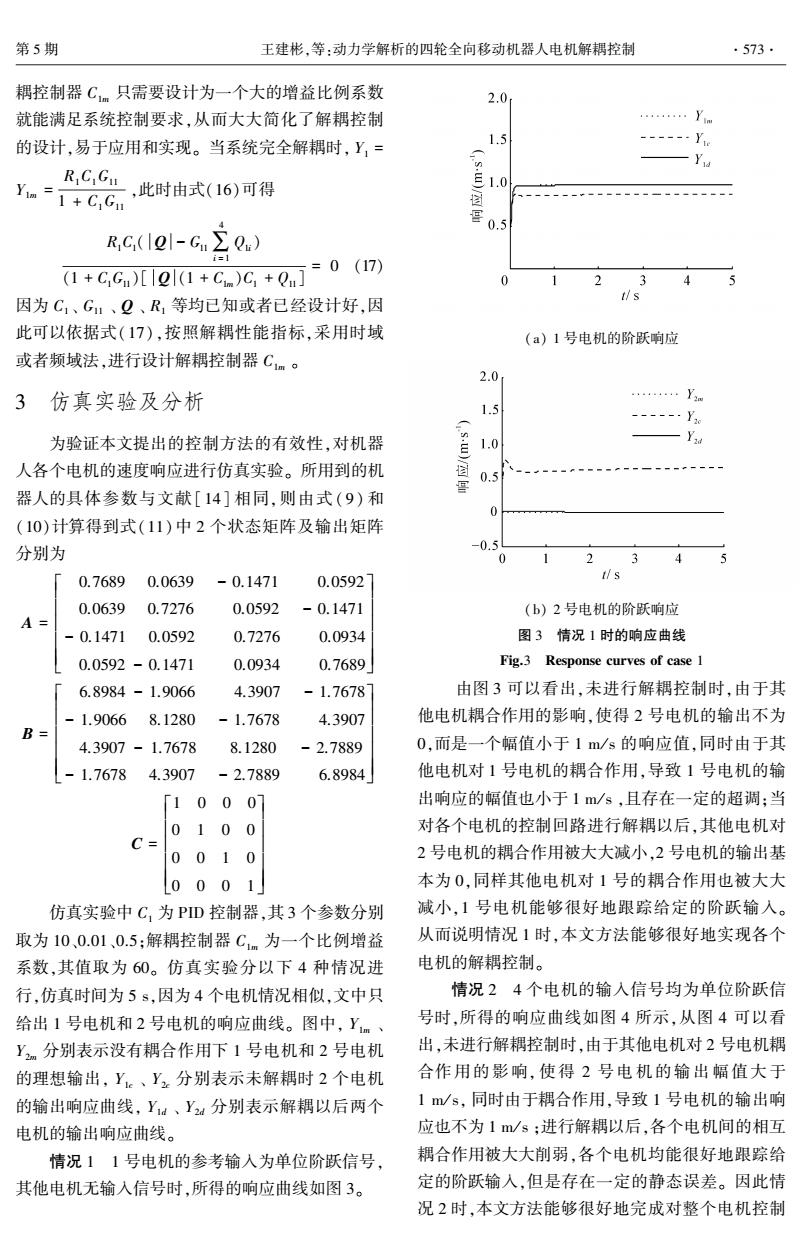
第5期 王建彬,等:动力学解析的四轮全向移动机器人电机解耦控制 ·573· 耦控制器Cm只需要设计为一个大的增益比例系数 2.0 就能满足系统控制要求,从而大大简化了解耦控制 …Yn 的设计,易于应用和实现。当系统完全解耦时,Y,= 1.5 ---…Ye R,C,G,此时由式(16)可得 1+C,G11 e05 R,C(lgl-G.∑Q.) (+GG)l(c+]0 ( i=1 2 3 4 5 t/s 因为C、G!、Q、R,等均已知或者已经设计好,因 此可以依据式(17),按照解耦性能指标,采用时域 (a)1号电机的阶跃响应 或者频域法,进行设计解耦控制器C1m。 2.0 3仿真实验及分析 小Yn 1.5 ----Y 为验证本文提出的控制方法的有效性,对机器 1.0 人各个电机的速度响应进行仿真实验。所用到的机 0.5 督 器人的具体参数与文献[14]相同,则由式(9)和 0 (10)计算得到式(11)中2个状态矩阵及输出矩阵 分别为 -0.5 0 23 4 5 0.7689 0.0639 -0.1471 0.0592 ∥s 0.0639 0.7276 0.0592 -0.1471 (b)2号电机的阶跃响应 A= -0.1471 0.0592 0.7276 0.0934 图3情况1时的响应曲线 0.0592-0.1471 0.0934 0.7689」 Fig.3 Response curves of case 1 6.8984-1.9066 4.3907 -1.7678 由图3可以看出,未进行解耦控制时,由于其 -1.9066 8.1280 -1.7678 4.3907 他电机耦合作用的影响,使得2号电机的输出不为 B= 4.3907-1.7678 8.1280 -2.7889 0,而是一个幅值小于1m/s的响应值,同时由于其 -1.7678 4.3907 -2.7889 6.8984 他电机对1号电机的耦合作用,导致1号电机的输 「10007 出响应的幅值也小于1m/s,且存在一定的超调:当 01 0 0 对各个电机的控制回路进行解耦以后,其他电机对 C= 001 0 2号电机的耦合作用被大大减小,2号电机的输出基 L000 1 本为0,同样其他电机对1号的耦合作用也被大大 仿真实验中C,为PD控制器,其3个参数分别 减小,1号电机能够很好地跟踪给定的阶跃输入。 取为100.01、0.5;解耦控制器Cm为一个比例增益 从而说明情况1时,本文方法能够很好地实现各个 系数,其值取为60。仿真实验分以下4种情况进 电机的解耦控制。 行,仿真时间为5s,因为4个电机情况相似,文中只 情况24个电机的输入信号均为单位阶跃信 给出1号电机和2号电机的响应曲线。图中,Ym、 号时,所得的响应曲线如图4所示,从图4可以看 Y2m分别表示没有耦合作用下1号电机和2号电机 出,未进行解耦控制时,由于其他电机对2号电机耦 的理想输出,Yk、Y,分别表示未解耦时2个电机 合作用的影响,使得2号电机的输出幅值大于 的输出响应曲线,Y、Y2a分别表示解耦以后两个 1/s,同时由于耦合作用,导致1号电机的输出响 电机的输出响应曲线。 应也不为1m/s;进行解耦以后,各个电机间的相互 情况11号电机的参考输入为单位阶跃信号, 耦合作用被大大削弱,各个电机均能很好地跟踪给 其他电机无输入信号时,所得的响应曲线如图3。 定的阶跃输入,但是存在一定的静态误差。因此情 况2时,本文方法能够很好地完成对整个电机控制耦控制器 C1m 只需要设计为一个大的增益比例系数 就能满足系统控制要求,从而大大简化了解耦控制 的设计,易于应用和实现。 当系统完全解耦时, Y1 = Y1m = R1C1G11 1 + C1G11 ,此时由式(16)可得 R1C1( Q - G11∑ 4 i = 1 Q1i) (1 + C1G11)[ Q (1 + C1m)C1 + Q11] = 0 (17) 因为 C1 、 G11 、 Q 、 R1 等均已知或者已经设计好,因 此可以依据式(17),按照解耦性能指标,采用时域 或者频域法,进行设计解耦控制器 C1m 。 3 仿真实验及分析 为验证本文提出的控制方法的有效性,对机器 人各个电机的速度响应进行仿真实验。 所用到的机 器人的具体参数与文献[ 14] 相同,则由式( 9) 和 (10)计算得到式(11)中 2 个状态矩阵及输出矩阵 分别为 A = 0.7689 0.0639 - 0.1471 0.0592 0.0639 0.7276 0.0592 - 0.1471 - 0.1471 0.0592 0.7276 0.0934 0.0592 - 0.1471 0.0934 0.7689 é ë ê ê ê ê ê ù û ú ú ú ú ú B = 6.8984 - 1.9066 4.3907 - 1.7678 - 1.9066 8.1280 - 1.7678 4.3907 4.3907 - 1.7678 8.1280 - 2.7889 - 1.7678 4.3907 - 2.7889 6.8984 é ë ê ê ê ê ê ù û ú ú ú ú ú C = 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 é ë ê ê ê ê ê ù û ú ú ú ú ú 仿真实验中 C1 为 PID 控制器,其 3 个参数分别 取为 10、0.01、0.5;解耦控制器 C1m 为一个比例增益 系数,其值取为 60。 仿真实验分以下 4 种情况进 行,仿真时间为 5 s,因为 4 个电机情况相似,文中只 给出 1 号电机和 2 号电机的响应曲线。 图中, Y1m 、 Y2m 分别表示没有耦合作用下 1 号电机和 2 号电机 的理想输出, Y1c 、 Y2c 分别表示未解耦时 2 个电机 的输出响应曲线, Y1d 、 Y2d 分别表示解耦以后两个 电机的输出响应曲线。 情况 1 1 号电机的参考输入为单位阶跃信号, 其他电机无输入信号时,所得的响应曲线如图 3。 (a) 1 号电机的阶跃响应 (b) 2 号电机的阶跃响应 图 3 情况 1 时的响应曲线 Fig.3 Response curves of case 1 由图 3 可以看出,未进行解耦控制时,由于其 他电机耦合作用的影响,使得 2 号电机的输出不为 0,而是一个幅值小于 1 m / s 的响应值,同时由于其 他电机对 1 号电机的耦合作用,导致 1 号电机的输 出响应的幅值也小于 1 m / s ,且存在一定的超调;当 对各个电机的控制回路进行解耦以后,其他电机对 2 号电机的耦合作用被大大减小,2 号电机的输出基 本为 0,同样其他电机对 1 号的耦合作用也被大大 减小,1 号电机能够很好地跟踪给定的阶跃输入。 从而说明情况 1 时,本文方法能够很好地实现各个 电机的解耦控制。 情况 2 4 个电机的输入信号均为单位阶跃信 号时,所得的响应曲线如图 4 所示,从图 4 可以看 出,未进行解耦控制时,由于其他电机对 2 号电机耦 合作用的影响, 使得 2 号电机的输出幅值大于 1 m / s, 同时由于耦合作用,导致 1 号电机的输出响 应也不为 1 m / s ;进行解耦以后,各个电机间的相互 耦合作用被大大削弱,各个电机均能很好地跟踪给 定的阶跃输入,但是存在一定的静态误差。 因此情 况 2 时,本文方法能够很好地完成对整个电机控制 第 5 期 王建彬,等:动力学解析的四轮全向移动机器人电机解耦控制 ·573·